|
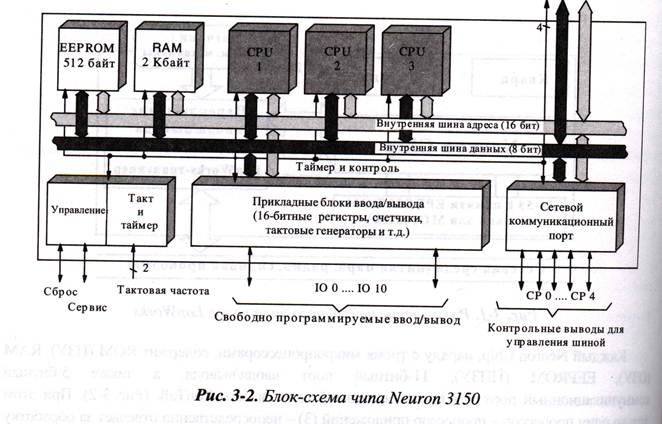
Реферат: Сеть на основе нейрочипаНесомненно, что с появлением NEURON Chip («нейронного чипа»-программно-аппаратный комплекс, предназначенный для разработки и отладки приложений для NEURON Chip) в распоряжение разработчиков поступил необходимый инструментарий – LonBuilder. Echelon не стала повторять ошибок других компаний и не концентрировала вес свои ресурсы на разработке новых версий NEURON Chip. Наоборот, приоритет был отдан разработке нового и улучшению существующего инструментария. Если сравнить результаты достигнутые в этом направлении LON-технологией и другими Fieldbus-системами, то LON значительно опережает все остальные. Так от стандартного аппаратного языка Assembler, компания Echelon перешла к программированию NEURON Chip на языке более высокого уровня NEURON C. Язык программирования приложения для NEURON Chip (CPU-3) основывается на ANSI-C, является ответвлением языка программирования С. Он был создан для NC и не может применятся для других процессоров. В основе построения локальной сети в стандарте LONWORKS лежит применение специализированных гибридных микросхем NEURON Chip в качестве микроконтроллеров узлов локальной сети. Микроконтроллер NEURON Chip содержит три 8-разрядных процессора, объединенных внутренней шиной со встроенными блоками общей оперативной и энергонезависимой памяти, а также периферийными устройствами (сетевым коммуникационным портом, таймерами, управляющими регистрами, портами ввода/вывода). Модель NEURON MC143120 также предусматривает использование и внешней памяти хранения программ. Несмотря на архитектурную симметричность внутренних процессоров, функциональное назначение каждого из них строго детерминировано. Два из них управляют сетевой передачей данных на основе многоуровнего сетевого протокола, а один предназначен для обслуживания прикладной части программного обеспечения узла. Синхронизация работы процессоров осуществляется за счет использования общих областей памяти данных. Уникальность адреса каждого из микроконтроллеров стандарта LONWORKS может быть обеспечено благодаря наличию собственного 48-разрядного идентификационного кода, записываемого в энергонезависимую память при их производстве. Взаимодействие с внешними устройствами производит процессор прикладного уровня посредством 11-выводного порта ввода/вывода. Функциональное назначение выводов порта может быть задано прикладным программным обеспечением, в зависимости от типов внешних устройств, обслуживаемых микроконтроллером. В случае недостаточной вычислительной или функциональной мощности микроконтроллера NEURON Chip для реализации функций узла по взаимодействию с внешними устройствами, в составе узла может быть применен дополнительный микроконтроллер, удовлетворяющий задаче сбора данных или управления. В этом случае порт ввода/вывода может быть использован для связи микроконтроллеров с целью организации обмена данными по параллельному интерфейсу, а сам микроконтроллер NEURON Chip выполняет только коммуникационные функции. Для реализации сетевых функций микроконтроллера служит 5-выводной коммуникационный порт, управляемый процессором, обслуживающим два нижних уровня сетевого протокола. С целью сопряжения микроконтроллера с физическим каналом связи, к коммуникационному порту подключаются приемопередатчики в соответствии с выбранным типом канала связи. 1.5.1. Основные характеристики микроконтроллеров NEURON Chip. Количество микропроцессоров в кристалле - 3, типа MC143120. Уникальный 48-битный код (NEURON ID). EEPROM, ROM и RAM память. 11 двунаправленных линий ввода/вывода. 2 16-битных таймера/счетчика. 5 линий коммуникационного интерфейса. Микроконтроллеры NEURON выпускаются в 64 выводном QFP (NEURON 3150) и 32 выводном SOIC корпусах (NEURON 3120xx ).
Промышленно выпускаемые в стандарте LONWORKS приемопередатчики обеспечивают организацию следующих типов каналов связи: линейного, свободной топологии, RS-485, радиочастотного, элекросетевого и т.д. Скорость передачи данных в каналах, в зависимости выбранного типа канала, обеспечивается в диапазоне 330 бит/с – 1.25 Mбит/c. Для сопряжения каналов связи различных типов могут применяться специальные маршрутизаторы, построение которых основано на применении двух микроконтроллеров NEURON, связанных по параллельному интерфейсу порта ввода/вывода, и имеющих собственные приемопередатчики, соответствующие характеристикам типов сопрягаемых каналов. На программно-логическом уровне построения маршрутизатора, устройству могут быть предписаны различные функции по передаче данных между сегментами локальной сети. Программное обеспечение микроконтроллеров NEURON составляется из трех разделов: системного программного обеспечения, прикладного, и программного обеспечения уровня связи данных. Структурная схема нейрочипа изображена на рисунке [рис.3-2]
Системное программное обеспечение является резидентным для каждого из микроконтроллеров. Его программный код либо прошивается во встроенный узел ROM моделей NEURON3120 на этапе производства микроконтроллеров, либо записывается в модуль внешней памяти моделей NEURON3150. На программно-логическом уровне системное программное обеспечение полностью реализует функции многоуровневого сетевого протокола LONWORKS, планировщика задач для прикладного уровня программного обеспечения, и содержит код библиотеки программных функций для управления портом ввода/вывода микроконтроллера. На основе применения программных средств, предоставляемых системным программным обеспечением, на базе порта ввода/вывода возможна организация нескольких типов интерфейсов с внешними устройствами: дискретного, параллельного, I2C, RS-232, Microwire, MicroLan и т.д. Системная часть программного обеспечения реализует также полный набор операций для управления сетевым взаимодействием узлов системы. Реализация сетевым протоколом LONWORKS функций управления конфигурацией сети, предоставляет возможность вынесения задач управления локальной сетью на отдельный уровень, обеспечиваемый, независимыми от особенностей построения отдельных узлов, аппаратно-программными средствами. Прикладная часть программного обеспечения строится разработчиком узла и определяет набор задач по обслуживанию связанных с функционированием узла процедур регистрации данных и управления исполнительными устройствами. На нижнем уровне систем автоматизации, построенных по стандарту LONWORKS, определяется набор входных и выходных сетевых переменных, необходимых для функционирования конкретного узла и реализации его сетевых функций. При проектировании прикладного программного обеспечения, описание сетевых переменных отдельного узла определяется либо непосредственно в самодокументированной секции энергонезависимой памяти микроконтроллера, либо описание их мнемонических имен, типов и разрядности записывается в специальный внешний файл описания интерфейса проектируемого узла. Описание сетевых интерфейсных функций узла применяется на этапе построения связей сетевых переменных. При использовании в качестве микроконтроллера узла модели NEURON3150 и внешней памяти программ типа FLASH, допускается загрузка прикладной части программного обеспечения узла по сети LONWORKS. Данная функция предоставляет возможность гибкого управления узлом без его демонтажа из системы. Разработка прикладного уровня программного обеспечения производится с применением специального языка программирования NEURON-C (специальной реализации языка C). C уровня прикладного программного обеспечения допускается использование (вызовов) всех функций, предоставляемых системной частью программного обеспечения. Для разработки узлов, построенных на базе NEURON, применяются специальные аппаратно-программные отладочные комплексы LONBUILDER и NODEBUILDER, производимые фирмой Echelon. LONBUILDER, представляет собой крейт, содержащий в себе блок питания, интерфейс для связи с компьютером и имеющий 7 слотов для установки эмуляционных модулей. LONBUILDER позволяет с помощью устанавливаемых в него модулей производить отладку: 1. прикладного программного обеспечения модулей разработанных пользователем на основе различных NEURON-контроллеров, 2. объединять несколько эмуляционных модулей в сеть Echelon .для отладки сетевых взаимодействий, 3. с помощью роутер-модуля осуществлять объединение действующей и проектируемой сетей, 4. объединять узлы ECHELON в сети различных типов, а также LONBUILDER может быть использован, в качестве шлюза-маршрутизатора сети ECHELON, с возможностью каскадирования отдельных крейтов LONBUILDER. Таким образом, LONBUILDER является мощнейшим средством отладки не только непосредственно прикладного программного обеспечения конкретного модуля, но и полноценным эмулятором сети ECHELON, а учитывая его широкие возможности при построении реальной сети его цена перестает быть столь пугающе высокой (от 24 тысяч долларов США в базовой поставке, состоящей из LONBUILDER, 2-х эмуляторов NEURON 3150, служебного модуля LONBUILDER, роутера, РС-карты, программного обеспечения и комплекта проводов). Уровень сопряжения узлов нижнего уровня системы автоматизации с устройствами верхнего уровня предполагает использование специализированного программного обеспечения для организации взаимодействия узлов микроконтроллерной сети. Как правило, устройство управления локальной сетью организуется на базе персонального компьютера, содержащего устройство сопряжения с сетью в стандарте LONWORKS. С уровня подобного компьютера возможно обеспечить управление связыванием выходных и входных переменных отдельных узлов нижнего локальной сети и осуществлять общие функции управления сетью, предусматривающие идентификацию узлов, определение и управление их статусом в локальной сети, тестирование сетевых переменных каждого из узлов. Структура связей сетевых переменных узлов локальной сети, и определенное при конфигурации сети состояние каждого из узлов, записывается как в энергонезависимую память узлов, так и в базу данных компьютера-конфигуратора сети. Необходимо отметить, что протокол LONWORKS предусматривает специальные функции по защите данных и их кодированию при передаче между узлами сети. Эти функции обеспечивают надежность передачи информации и невозможность несанкционированной замены узлов локальной сети.
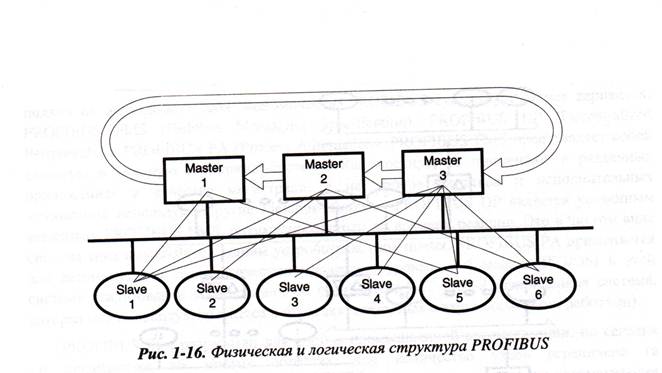
На рисунке 1-16 указана структура обмена данными между нейрочипами типа SLAVE A и MASTER A. На данном рисунке изображены три нейрочипа MASTER A, но для обработки в нашем случае достаточно и одного. Для сопряжения нижнего уровня локальной сети, построенной на базе стандарта LONWORKS, c уровнем компьютерных станций могут быть применены платы и автономные устройства, промышленно выпускаемые фирмами, поддерживающими данный стандарт. Так фирма IEC (США) производит автономный сервер данных (Datalogger), реализованный на базе PC-104 и оснащенный интерфейсной платой для взаимодействия с сетью, выполненной на базе микроконтроллера NEURON. При организации работы станций верхнего уровня систем автоматизации, базируемых на стандарте LONWORKS, может применяться как коммерческое, например, производимое фирмой IEC, так или же специализированное программное обеспечение разработанное отдельными пользователями для решения конкретных задач (например, MIMS, разработанное Sandia National Laboratories). 1. Постановка задачи 1.1. Обзор литературы и предлагаемые методы решения. В связи с тем, что первый нейрочип был произведен в середине 1999 года, то количество литературы описывающей работу нейрочипа ограничено. Отечественных книг еще не написано, используются только переводы зарубежных авторов. Так наиболее подходящей книгой для реализации данного задания является книга немецкого автора Дитрих – Лой – Швайнцер «Lon технология». В этой книге есть как структурная, функциональная, так и программная реализация работы нейрочипа. Внутренней, электрической схемы нейрон чипа найдено не было по ранее описанным обстоятельствам и в связи авторским патентом выданным в США (USA patent № DC1233 -10 1999) о авторских правах на реализацию нейрочипа. Поэтому приведенная в приложении №1 схема является лишь примерной функциональной - электрической схемой, т.е. изображены внешние выводы микросхем, но а внутренней структуре умалчивается. Методов реализации поставленной задачи в нашем случае может быть довольно много. Это обусловлено тем, что элементная база достаточно разнообразна и постоянно усовершенствуется. Так, например, на данный момент существует порядка 15 видов нейрочипов, со встроенной и внешней памятью, работающих на разных частотах, различным количеством выводов и разной формой, размером микросхем. По заданию необходимо реализовать сеть на основе нейрочипа для обработки данных поступающих с аэродинамических датчиков подсчета скорости ветра. Т.к. данная сеть должна состоять из двух основных частей: разветвленной сети датчиков (каждый элемент состоит датчика + обрабатывающий нейрочип) и центрального процессора ( пороговый нейрочип + шина передачи данных в компьютер ), то тип нейрочипов и внешних устройств выбран оптимально из условия обеспечения их следующими компонентами: 1) напряжение питания : +(5-12)В 2) место размещения : объемом 30х20х7 (см3) 3) вибрационная устойчивость Исходя из данных требований был выбран следующий тип нейрочипов, преобразующих устройств и устройств сопряжения: нейрон чип SLAVE A MC143120 32-LED SOG , нейрон чип MASTER A MC143120 32-LED SOG, преобразующее устройство MS555, устройство сопряжения MC145407. 1.2. Анализ задания. В соответствии с заданием необходимо обработка информации поступающей с аэродинамических датчиков (датчики анализа скорости ветра) и передача поступающей информации по сети в ЭВМ, сеть реализовать на основе нейрочипа. Исходя из этого наше устройство будет состоять из двух глобальных частей: часть относящаяся к датчику SLAVE A BLOCK, и часть относящаяся к ЭВМ MASTER A BLOCK. Первый блок будет состоять из преобразующего чипа «555», который преобразовывает аналоговый электрический сигнал в прямоугольный импульсный сигнал. Далее сигнал поступает на вход NC SLAVE A, где производится подсчет количества импульсов в определенный промежуток времени, т.о. частота импульсов соответствует скорости ветра. После подсчета данные вместе с номером нейрочипа (каждый чип имеет свой индивидуальный номер, который зашивается в нем при производстве) попадают в устройство сопряжения NC с линией передачи. Затем через линию связи, в нашем случае это RS232C, преобразовавшись снова в устройстве сопряжения информация поступает в NC MASTER A, в котором она обрабатывается и если скорость ветра содержащаяся в данном пакете информации превышает допустимый порог в 50м/с, то пакет дополняется данными ( время получения пакета нейрочипом MASTER A : часы, минуты), и снова через устройство сопряжения передается в центральную ЭВМ по линии связи RS232C. Т.о. в ЭВМ будет получен пакет содержащий данные о скорости ветра, местоположении датчика ( которое будет определено по номеру нейрочипа), и времени получения данной информации. Обновление информации происходит каждые 100мкС ( причем данный параметр является установочным, т.е. его можно изменить при перепрограммировании нейрочипа MASTER A. В нашем случае используется линия передачи RS232C, это не самый лучший, но самый простой вариант реализации передачи данных между датчиком и ЭВМ. Интерфейс RS232C накладывает серьезные ограничения на расстояния между датчиком и центральной ЭВМ. Оно не может превышать 300 м, т.к. расстояние между SLAVE A BLOCK и MASTER A BLOCK может составлять порядка 150м и расстояние между MASTER A BLOCK и центральной ЭВМ может составлять 150м, в сумме 300м. Как было сказано выше это не самый лучший вариант, т.к. взлетное поле большого аэродрома может тянуться на 15-20км, то передачу информации нужно будет производить с помощью повторителей. Но используя трансиверы MC145407 возможно сопряжение не только с RS232C, но и другими интерфейсами RS…, т.к. возможна передача за счет инфракрасного излучения и радио сигналов. Все эти методы передачи данных позволяют значительно увеличить расстояния между датчиками и центральной ЭВМ, но они являются более дорогостоящими и могут внести помехи в работу бортовых радиолокационных станций самолетов и РЛС терминала аэропорта. Поэтому в нашем случае целесообразно использовать интерфейсы типа RS. 1.3. Описание алгоритма. Описанная выше структура передачи сигнала ведет к формированию определенного алгоритма работы программы. Исходя из данной структуры программа была разбита на две части: 1-ая часть является счетчиком которая считает количество импульсов подаваемых на 5 вход микросхемы NC SLAVE A. Это производится путем подсчета чередования нулей и единиц на данном входе за определенный промежуток времени. 2-ая часть является анализатором, т.е. анализируется поступающая информация с большого количества датчиков (+нейрочип). Данные считываются каждые 100мкС. Если доходя до условия превышения порога в 50 импульсов, что соответствует скорости ветра в 50м/с, эти данные выделяются и после дополнения к ним времени передаются в линию передачи RS232C. Есть так же дополнительная часть для программирования NC в SLAVE A mode. Т.е. для того, чтобы не было нарушений в работе нейрочипов необходимо определить приоритеты в их работе, т.е. SLAVE A имеет приоритет ниже, чем
Выводы. Таким образом мы имеем конкретную задачу и способ ее решения. В главе 2 будет рассмотрена ее реализация на языке NEURON C. 2. Разработка программы. 2.1. Структура программы с описанием При анализе устройства была выбрана такая структура при которой схема была разделена на две части программирование которых ведется отдельно через выводы CP0…CP4 каждого из нейрочипов, данная структура позволила не только уменьшить размер программ для программирования нейрочипов, но и упростить сам непосредственный процесс программирования и уменьшить затрат времени на тестирование чипа и объема его ПЗУ. Для этого вся программа была разбита на отдельные модули, каждый из которых определяет свою область работы, первая выполняет стандартную загрузку нейрочипа в SLAVE A mode, вторая загружается в данный чип и выполняет пересчет импульсов поступающих на его вход и передачу данных в интерфейс RS485 и третья часть(основная) выполняет обработку сигнала поступающего со всех нейрочипов типа SLAVE A включенных в LonWorks протокол . 1-ая часть стандартным методом переводит нейрочип в SLAVE A mode. Это необходимо для уменьшения уровня его приоритета, чтобы информация поступающая со всех нейрочипов данного вида не вступала в конфликт при выходе из интефейса RS 485, т.к. это приведет к ошибкам при пересылке данных и неправильной работе обрабатывающего нейрочипа. 2-ая часть является счетчиком которая считает количество импульсов подаваемых на 5 вход микросхемы NC SLAVE A. Это производится путем подсчета чередования нулей и единиц на данном входе за определенный промежуток времени. 3-ая часть является анализатором, т.е. анализируется поступающая информация с большого количества датчиков (+нейрочип). Данные считываются каждые 100мкС. Если доходя до условия превышения порога в 50 импульсов, что соответствует скорости ветра в 50м/с, эти данные выделяются и после дополнения к ним времени передаются в линию передачи RS232C. 2.2. Структура модулей. 1-ый модуль состоит из процедуры стандартных команд в ходящих в пакет поставки нейрочипа фирмы Motorola. 2-ой модуль состоит из процедуры pragma enable_io_pull-ups которая является счетчиком по входу 5 через каждые 100мкС данные выводятся в линию связи. 3-ый модуль состоит из следующих процедур : а) pragma scheduler_reset // процедура сброса б) pragma enable_io_pull-ups // процедура подчета импульсов (описана выше) в) pragma num_addr_table_entries 1 //процедура добавления временных данных к уже имеющимся г) pragma one_domain // главная процедура ( объединение всех остальных) д) pragma app_buf_out_priority_count 0 // процедура обнуления буфера е) pragma net_buf_out_priority_count 0 // процедура обнуления счетчика
.
2.3. Описание интерфейса 2.3.1. Человеко–машинный интерфейс Человеко-машинный интерфейс можно считать «историей, не имеющей конца». Это – модель, которая будет совершенствоваться вместе с ростом знаний человека о своем собственном поведении, восприимчивости и ответных реакциях. Fieldbus –система- это система датчиков и исполнительных механизмов. Для того чтобы люди, обслуживающие устройства, машины и т.д., могли быстрее, лучше, эффективнее работать с ними, придется «прощупать многие каналы». В будущем интерфейсе человек-машина основные задачи возьмут на себя, наряду с клавиатурой и возможными камерами, микрофоны, датчики вкуса, запаха и температуры, молниеносно реагирующие на любые действия человека.
2.3.2. Обработка ошибок Обработка ошибок происходит посредствам внутренней защиты NC. Перепады напряжения определяются блоком MC33164, который приостанавливает работу NC. Запуск происходит через интервал установленный Выводы Таким образом мы имеем готовые программы на языке NEURON C. В следующей главе будут описаны результаты тестирования и работы программы. 3. Результативная часть 3.1. Тестирование программы. 3.1.1. Выбор методики тестирования. Выбор методики тестирования сложная задача, которая ставится перед программистом и может повлиять на дальнейшее развитие программного продукта, его усовершенствование. Цель тестирования выявить ошибки программы еще на начальном этапе, до его распространения. Для этого были разработаны специальные методы тестирования : восходящее и нисходящее тестирование, V –тестирование, тестирование по принципу черного и белого ящика. Каждый из данных методов имеет свою специфику и направлен на устранение определенных видов ошибок, но каждый метод отличается по принципу своей реализации. Так, например, V-тестирование проводится с редактированием программы, так как в данном тестировании блокируются определенные блоки программы , а остальные тестируются. В методе тестирования по принципу черного или белого ящика программа не претерпевает ни каких изменений, но возможно, что это тестирование может привести к зависанию компьютера или другим сбоям в системе, т.к. принцип действия этого метода заключается в максимальной загрузке программы, заполнения всех полей, ввод неверных данных не зная, что и куда попадет , как бы в темноте ( черный ящик) или открыто (белый ящик). Восходящее и нисходящее тестирование очень похоже на V-тестирование, только в отличии от него выбирается конкретное направление тестирования, от большого ( основного блока к меньшим ( процедуры, функции) или наоборот, от меньших к большим . При этом одни блоки заменяются заглушками, а другие тестируются. В нашем случае провести какой-то из данных методов возможно только по отношению к программе, для тестирования же устройства необходимо тестировать его производительность или имитировать данное устройство. |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||