|
Курсовая работа: Механизм поворота руки промышленного робота (модуль М4)Курсовая работа: Механизм поворота руки промышленного робота (модуль М4)МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ Национальный аэрокосмический университет им. Н.Е. Жуковского “ХАИ” Кафедра 202 ХАИ. 202.239.01В.715.09.01 Пояснительная записка по курсовому проекту Механизм поворота руки промышленного робота (модуль М4) по дисциплине: “Конструирование машин и механизмов” Выполнила: студент гр.239 Збаравская Т.В. Проверил: доцент каф. 202 Василенко В.М. 2005 Содержание Введение 2. Расчет исполнительных механизмов 2.1 Расчет зубчатой ременной передачи 2.2 Расчет волновой передачи 4. Расчёт на прочность валов 6. Расчет болтов крепления двигателя к корпусу 8. Смазывание подшипников и передач Список использованной литературы ВведениеМанипуляционный робот содержит две органически связанные части устройство управления и манипулятор. Устройство управления включает в себя чувствительные устройства, элементы обработки и хранения информации, устройство управления приводами. Манипулятор с точки зрения механики и теории механизмов - сложный пространственный управляемый механизм с несколькими степенями свободы, содержащий жесткие и упругие звенья, передачи и приводы. Движения манипулятора осуществляется от приводов, которые могут располагаться на подвижных звеньях или на подвижном основании. Число приводных двигателей обычно равно числу степеней свободы манипулятора, хотя во время выполнения технологических операций на систему могут накладываться дополнительные связи. Передача движения от двигателя к звеньям механизма выполняется с помощью передаточных механизмов различного вида. Система таких механизмов при расположении приводов на основании может быть достаточно сложной. Технологические возможности и конструкцию промышленных роботов определяют следующие основные параметры: грузоподъемность, число степеней подвижности, форма и размеры рабочей зоны, погрешность позиционирования и тип системы управления. В машиностроении используют принципы агрегатно-модульного построения промышленных роботов. Агрегатный модуль - это функционально и конструктивно независимая единица, которую можно использовать индивидуально и в соединении с другими модулями с целью создать промышленные роботы с заданными компоновочными схемами, характеристиками и типом устройства управления. Рассмотрим промышленный робот для обслуживания станков с числовым программным управлением ЧПУ М20П 40.01 с агрегатно-модульным принципом построения. Он предназначен для автоматизации операции "установка-снятие" заготовок и деталей, смены инструмента и других вспомогательных операций при обслуживании станков с ЧПУ. Промышленный робот включает в себя следующие механизмы различного исполнения: поворота (М1); подъема и опускания (М2); выдвижения руки (М3); поворота кисти руки (М4). ЧПУ позиционного типа обеспечивает управление перемещением руки в цилиндрической системе координат, цикловое управление движениями кисти и зажимом-разжимом схвата, подачу команд пуска циклов работы станков и другого технического оборудования, а также прем ответных команд после выполнения этих циклов. Механизм поворота руки робота (модуль М4) содержит электродвигатель постоянного тока, зубчато-ременную и волновую передачи. Задание на курсовой проект включает в себя упрощенную кинематическую схему механизма робота. Кинематическая схема фактически снимает необходимость обоснования выбора типа механической передачи. Однако для того чтобы решить, какой передаточный механизм предпочтительнее, необходимо учесть условия работы, допускаемые габариты, расходы на технологичность конструкции, стоимость механизма и ряд других факторов. 1. Выбор двигателя Для того чтобы выбрать двигатель, необходимо определить его потребленную мощность по параметрам выходного элемента механизма, используем формулу:
Где F - усилие сопротивления перемещению, Н; V - скорость перемещения, м/с; hобщ - КПД всего механизма, равный произведению КПД передач, входящих в механизм hобщ=h1h2…hп. Среднее значение КПД передач и других элементов механизма выбираю из таблицы3.1 (Учебное пособие “Проектирование механизмов роботов” В.И. Назин).
По рассчитанной мощности выбираю двигатель. Мощность выбранного двигателя должна быть больше рассчитанной мощности, т.е. следует выбирать из каталога двигатель ближайший большей мощности. Из конструкторских соображений я выбрала двигатель типа ДК1-3.5 Это маломощный электродвигатель постоянного тока с обычным пазовым якорем, коллектором и постоянным магнитами. Он относительно тихоходный, укомплектованный встроенным датчиком перемещениям и электромагнитным тормозом. Двигатель ДК1-3,5
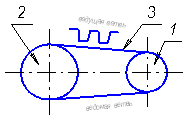
2. Расчет исполнительных механизмов 2.1 Расчет зубчатой ременной передачи Перспективным видом гибкой связи является зубчатые ремни. Они имеют высокую тяговую способность и сравнительно большой КПД. Передачи этого типа работают без смазки, устойчивы к действию абразивных и агрессивных сред, позволяет синхронизировать движения входного и выходного звеньев, просты в эксплуатации. В отличие от плоских, клиновых и поликлиновых передач в зубчатых ременных передачах движение передается посредством сил трения, а также зацеплением ремня и шкивов, т.е. устанавливается достаточно жесткая кинематическая связь между ведущими и ведомыми звеньями механизмов.
Простейшая передача с зубчатым ремнем состоит из ведущего 1, ведомого 2 шкивов и охватывающего их зубчатого ремня 3. Вычисляем общее передаточного отношения механизма робота по формуле:
Так как в механизме две ступени, то мы принимаем UЗР=2, а UВП=114. Определяем момент, мощность и частоту вращения на ведомом шкиве зубчато-ременной передачи: момент: Т2=Т1Ä UЗРÄhlуч=1.7Ä2Ä0.99Ä0.96=3.231 НÄм, частота вращения:
Мощность Р2=Р1Ählуч=360Ä0.99Ä0.96=342,144 Вт. По величине крутящего момента на ведущем шкиве из справочника выбираем модуль зубчатого ремня m=3 мм. Определим число зубьев малого шкива из справочника по модулю зубчатого ремня. Если m=3, то Z1=14. Зная передаточное отношения зубчатого ремня, определим число зубьев ведомого шкива. Z2 = Z1Ä. UЗР =14Ä2=28. Диаметры ведомого и ведущего шкива: d1 = mÄZ1 =3Ä14=42 мм. d2 = mÄZ2 =3Ä28=84 мм. Вычисляем окружную скорость ремня Vокр используя зависимость:
Действительная частота вращения ведомого шкива:
Уточненное передаточное отношение:
Межосевое расстояние вычисляем как а=1,5 (d1+d2) =1,5 (42+84) =252 мм. Определяем длину ремня из формулы:
Число зубьев ремня (расчетное)
Количество зубьев ремня округляем до стандартного
Сила, передаваемая зубчатым ремнем:
Коэффициент КF принят равным единице для спокойной пусковой нагрузки. Расчетную допускаемую удельную силу на ремне определяем по зависимости: FY= [F] 0ÄCUÄCzÄCp Где CU =1 Cz=1 Cp=0.9 FY=9Ä1Ä1Ä0.9=8,1 H/мм. Число зубьев ремня, находящихся в зацеплении с ведущим и ведомым шкивами, вычислим:
Принимаем Z1з=7
Принимаем Z2з=15 Определим необходимую ширину ремня:
Где q=4Ä10-4 кг/ (мÄмм) - погонная масса Сш=1.05 - Коэффициент, учитывающий неполноту витков каната у боковых поверхностей ремня. Принимаем ширину ремня в соответствии со стандартным рядом В=32мм. Рассчитаем удельное давление на рабочих поверхностях зубьев ремня и сравним с допускаемым:
где Условие удельного давления Р< [Р] 0,63МПа<0,75МПа выполняется. Величину начального натяжения ремня F0 вычислили по эмпирической зависимости:
Силу, действующую на вал передачи, определяем: Fr=1.1Ä FT=1.1Ä80,95=89,045 H. Для динамического анализа зубчатой ременной передачи рассчитываем критическую линейную скорость ремня в такой последовательности: а) Из справочника для ремня с модулем m=3
находим собственную частоту б) Определим натяжение ведущей и ведомой ветвей ремня: Fвщ = F0+0.5ÄFT = 43,173+0.5Ä80,95 =83,65 Н Fвд = F0-0.5ÄFT = 43,173-0.5Ä80,95 = 2,7 Н в) Определим деформацию одного шага ведущей и ведомой ветви ремня:
a' =14Ä10-4 мм2/Н - выбирается из справочника. xс1 = aÄFвщ =4,375Ä10-5Ä83,65 = 0.00366 мм; xс2 = aÄFвд =4,375Ä10-5Ä2,7 =0.000517 мм. г) находим критическую скорость зубчатого ремня: при КВ=0.5Ä (ZP-Z1З-Z2з) =0.5 (75-7-15) =26; получаем для ведущей ветви ремня:
для ведомой ветви ремня:
Следовательно, передача работает в дорезонансной зоне, т.к. Vокр<Vкр и не требует корректировку параметров. Основные параметры зубчатого ремня и шкивов.
Страницы: 1, 2 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||