|
Курсовая работа: Механізм приводу поршневого насосуРис. 7 Вихідні дані: - схема механізму без маховика; - маси і моменти інерції ланок:
-
середня кутова швидкість ведучої ланки -
коефіцієнт нерівномірності руху - графік зведених моментів сил; - графік зведених моментів інерції. 3.2 Будуємо графік робіт сил опору Для цього застосуємо метод графічного інтегрування графіка зведених моментів сил. Послідовність інтегрування: - вибираємо полюс інтегрування Р на відстані Н=50 мм від осі ординат на продовженні вісі абсцис; - будуємо ординату, яка відповідає середині інтервалу 0-1, проектуємо її на вісі ординат і з’єднуємо точку 1’ ординати 01’ з полюсом Р; - теж саме робимо на наступних інтервалах; - з точки 0’ навої осі координат проводимо відрізок на інтервалі 0’1 паралельно променю Р1’ , з кінця отриманого відрізка проводимо відрізок на інтервалі 12 паралельно променю Р2’ і т.д.; - з’єднуємо отримані точки плавною кривою. Отримана крива О’К є графіком робіт сил опору. Оскільки за цикл усталеного руху робота рушійних сил дорівнює роботі сил опору, та з’єднавши т.О’ з т.К отримаємо графік робіт рушійних сил. 3.3 Будуємо графік приросту кінетичної енергії Виконавши алгебраїчне сумування ординат граіфка робіт рушійних сил (беремо зі знаком “+”) та графіка робіт сил корисного опору (беремо зі знаком “-”). Визначаємо масштабні коефіцієнти побудови графіків:
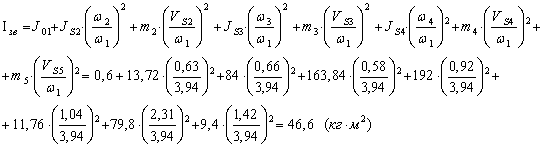
3.4 Будуємо графік зведених моментів інерції Ізв Для
цього визначаємо зведений момент інерції для 12-ти положень механізму. Оскільки
умовою зведення є рівність кінетичних енергій За цією формулою знаходимо зведені моменти інерції в 12-ти положеннях. Результати заносимо в таблицю 3.1. Розрахуємо зведений момент інерції для 3-го положення механізму.
Значення зведених моментів інерції Таблиця 5.
За даними Табл.7 будуємо графік зведених моментів інерції, повернений на 900, в масштабі
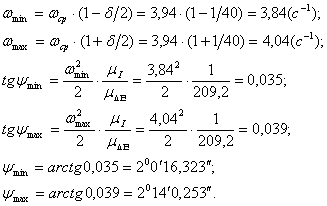
3.5 Будуємо графік залежості Для
визначення момента інерції маховика необхідно сопчатку визначити максимальний
приріст кінетичної енергії
При
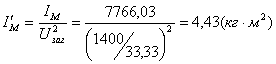
відомих значеннях Визначаємо момент інерції маховика:
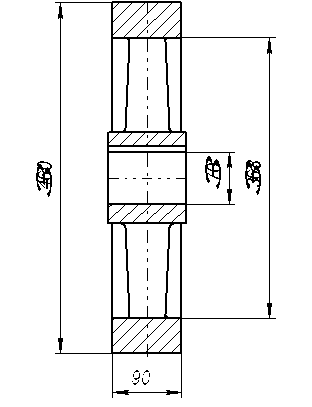
3.6 Визначаємо геометричні розміри маховика Оскільки за попередніми розрахунками момент інерції маховика має велике значення і розміри маховика вийдуть великими, доцільно розмістити маховик на валу електродвигуна. Тоді момент інерції маховика буде мати таке значення:
Конструктивно приймаємо, що маховик виготовлений в вигдяді диска з масою, зосередженою на ободі, момент інерції якого:
Тоді зовнішній діаметр маховика розраховуємо за формулою:
де Знаходимо внутрішній діаметр кільця: D1=D·ΨH=0,46·0,8=0,368 м, де ΨH = D1/D - відношення внутрішнього діаметра кільця до зовнішнього, яке рекомендується приймати в межах ΨH = 0,6...0,8 (в даному випадку приймаємо ΨH = 0,6). Ширина обода маховика:
Знаходимо масу маховика:
Знаходимо колову швидкість обода маховика:
Така
швидкість дрпустима для чавунних маховиків (
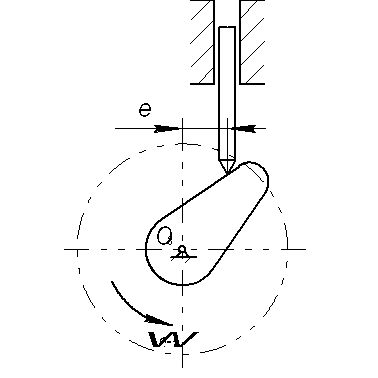
Рис. 8 4. Синтез кулачкового механізму Схема механізму
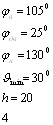
Виконуємо синтез механізму, кінематичний і динамічний аналіз кулачкового механізму з роликовим коромислом за вихідними даними: Таблиця 6.
4.1 Будуємо графік кутового переміщення штовхача Починаємо побудову з графіка аналога прискорень. Далі за методикою інтегруємо графік аналога прискорень і отримуємо криву яка представляє собою графік аналогу швидкостей штовхача. Інтегруючи цей графік, отримаємо криву, яка представляє собою графік кутувого переміщення штовхача. Визначаємо масштабні коефіцієнти побудови графіків: Масштабний коефіцієнт осі абсцис діаграм:
Де
(0-275) – відрізок відповідний суммі цих кутів. Масштабний коефіцієнт діаграми переміщення:
Де
Масштабний коефіцієнт діаграми швидкостей:
Де
Масштабний коефіцієнт діаграми прискорень:
Де
Масштабний коефіцієнт діаграми кутової швидкості:
Де
Масштабний коефіцієнт діаграми кутового прискорення: привід поршневий насос кінетостатичний
4.2 Виконуємо перевірку розрахунків на ЕОММетод
базується на графічному способі розвязання умови 1.
Визначаючи параметри 2.
Якщо рух передається від профілю кулачка до
штовхача на фазі наближення, то щоб виконувалась умова 3.
В кулачкових механізмах із геометричним замиканням
вищої кінематичної пари
Кінці
відрізків z з’єднуємо плавною кривою і отримуємо діаграму
залежності До
отриманої діаграми проводимо дотичні під кутом тиску Приймаємо: -
радіус початковой шайби 4. Побудова профілю кулачка. Побудова аиконується в масштабі . 1.
Креслимо заданий графік функції 2. Напродовженні осі абсцис вибираємо довільну точку С що належить штовхачу, і проводимо паралельно до осі ординат лінію руху штовхача, на якій розмічаємо точками 1, 2, 3, ... ,m шлях руху точки С . 3.
З центра О проводимо коло радіусом 4. Перенесимо за допомогою циркуля положення точоки С з розмітки на відповідні напрямні штовхача у відносному русі навколо кулачка і, зєднавши їх плавною кривою, одержимо теоретичний профіль кулачка. 5.
Зточок теоретичного профілю проводимо кола
радіусами Слід зазначити, що в кулачку центрального кулачкового механізму фазові кути і кути відповідних профілів збігаються, а в кулачках позацентрових кулачкових механізмів кути профілів віддалення і наближення залежно від величини і напрямку ексцентриситету можуть бути як більшими, так і меншимивідповідних фазових кутів. 6. Для побудови практичного профіля кулачка проводимо коло радіусом ролика, яке повторюємо багаторазово, прийнявши за центр лінію теоретичного профілю. Будуємо еквівалентний профіль, який є практичним профілем. 5. Аналітичне визначення радіуса-вектора теоретичного профілю кулачка Вихідні
дані: R0
= 34мм; Вихідні данні: R0 = 34мм, e = 10мм, j в = 115°(2рад.), j = 25° (0.35 рад.), j н = 130° (0.35 рад.) Sm = 20мм, rр = 0 мм Для даного закону руху коефіцієнти переміщення y і швидкості d вибираємо із таблиці. При К = j / j в = 100 / 115 = 0,87; y = 0,870; d = 1.8 Переміщення S і аналог швидкості S = (y ∙ Sm) = 0,870 ∙ 20 =17,4мм;
Визначаємо S0, J: S0 = tg J J = аrctg 0. =12°4`25,79``. Визначаємо кут g - кут між радіусом – вектором теоретичного профілю і напрямом рушу штовхача g = arcsin ( e / r ) = arcsin ( 10 / 34) = 17°6`16,69``. Радіус - вектор практичного профілю кулачка буде : rп =
5. Геометричний синтез евольвентного нульового прямозубого зачеплення Вихідні дані:
5.1 Визначення геометричних параметрів зубчастого зачеплення Визначаємо крок зачеплення
Визначаємо радіуси ділильних кіл:
Визначаємо радіуси основних кіл:
Визначаємо товщини зубців:
Визначаємо радіуси западин:
Визначаємо міжосьову відстань:
Визначаємо радіуси початкових кіл:
Визначаємо висоту зубців:
Визначаємо радіуси вершин зубців:
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||


 .
.

 =
= мм;
мм; мм.
мм. мм;
мм; мм.
мм. мм.
мм. мм;
мм; мм.
мм.
