|
Курсовая работа: Механізм приводу поршневого насосуВиконуємо перевірку розрахунків на ЕОМВикреслювання елементів зубчастого зачепленняПобудову евольвентного зачеплення виконуємо в масштабі М5:1. На лінії центрів коліс від точки Р (полюса зачеплення) відкладаємо радіуси rW1 і rW2 початкових кіл та будуємо ці кола.Проводимо пряму
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| х ,мм | 0 | 10 | 20 | Р | 30 | 40 | 50 | 60 | 70 | 78 |
| λ1 | -∞ | -2,13 | -0,33 | 0 | 0,26 | 0,56 | 0,74 | 0,86 | 0,95 | 0 |
| λ2 | 1 | 0,68 | 0,24 | 0 | -0,48 | -1,32 | -2,93 | -6,33 | -18,25 | -∞ |
Користуючись
даними таблиці 1. будуємо діаграми ![]() =f(x) і
=f(x) і ![]() =f(x).
=f(x).
![]() 1/мм.
1/мм.
Для того щоб виділити ті частини діаграм, які вказують значення λ1 і λ2 для робочих ділянок профілів, потрібно через точки a i b провести перпендикуляри до лінії зачеплення, які відокремлюють на діаграмах шукані ділянки (заштриховані на креслені).
Коефіцієнт питомого тиску
Цей коефіцієнт знаходиться при розрахункові зубців коліс на контактну міцність і визначається за формулою:
 ,
,
де
m - модуль зачеплення, ![]() .
.
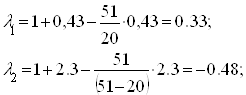
При х = 10мм
![]()
Таблиця 8. - Значення коефіцієнтів питомого тиску
| х,мм | 0 | 10 | 20 | Р | 30 | 40 | 50 | 60 | 70 | 78 |
|
|
- |
1,04 | 0,61 | 0,54 | 0,49 | 0,46 | 0,5 | 0,65 | 1,26 |
- |
Користуючись
цими даними будуємо діаграму ![]() в масштабі
в масштабі ![]()
![]() 1/мм.
1/мм.
Задача
Виконати синтез планетарної передачі, яка входить до складу приводу (рис.1), за такими вихідним даними:
-
частота обертання електродвигуна: ![]() об/хв;
об/хв;
-
частота обертання кривошипа робочої машини: ![]() об/хв;
об/хв;
-
кількість зубців коліс: ![]() ,
, ![]() ;
;
-
модуль планетарного механізму ![]() мм.
мм.
Визначаємо
передаточне відношення планетарного редуктора ![]() .
.
Оскільки передаточне відношення від двигуна до робочої машини
![]()
![]() ,
,
 .
.
![]() то
то ![]()
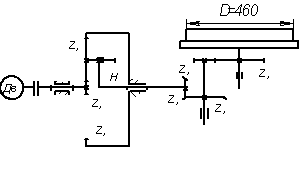
Рисунок 10.-Схема приводу
Безмашинний розрахунок числа зубців планетарного редуктора
Задаються числом зубців малого центрального колеса 1 так, щоб було
Z1 ³ 18. При цьому , для забезпечення умови складання Z1 повинно бути кратним числу сателітів . Найбільш вигідне число сателітів n=3 . Тоді , при кратному n значення Z1
З умови забезпечення передаточного відношення визначають число зубів Z2
Великого (короного) центрального колеса:
![]()
При цьому значення Z2
Закругляють до числа , кратного числусателітів , і щоб Z2
Задовільняло умові правильності зачеплення .
Де N- ціле число.
де u1H - передаточне відношення редуктора;
p - ціле число повних обертів водила;
З умови співвісності вибирають число зубів сателіта
![]() .
.
Перевіряємо на умову сусідства.
 ,
,
де k - кількість сателітів;
сусідства виконується.
Отже, Z1=18, Z2=63, Z3=144.
Синтез планетарного механізму з застосуванням ЕОМ (Додаток Б).
Приймаємо:
- планетарна передача за схемою 1;
- кількість сателітів К =3;
- допустима похибка величини U3H : E = 3%;
- модулі коліс: m1 = m2 = 3 мм;
- зона пошуку Z1 min = 18, Z1 max = 50; Z2 min = 20, Z2max = 60.
Аналіз результатів синтезу на ЕОМ
Прийняті вихідні дані задовольняють декілька варіантів механізмів (див. Додаток Б), серед яких найменші розміри будуть у планетарного редуктора з числами зубців коліс:
Z1 = 18, Z2 = 63, Z3 = 144.
Визначаємо фактичне передаточне відношення:
U1HФ =1-U13H = 1+ z3/z1 = 1+144/18 =9
Кінематичний аналіз планетарного механізму
А.
Визначаємо значення абсолютних ![]() і відносної
і відносної ![]() кутових швидкостей
ланок аналітичним методом:
кутових швидкостей
ланок аналітичним методом:
 рад/с;
рад/с;
 рад/с.
рад/с.
Для
обчислення ![]() скористаємось
формулою Вілліса:
скористаємось
формулою Вілліса:
 , де
, де  .
.
Звідки:
 рад/с.
рад/с.
Кутова швидкість блоку сателітів відносно водила:
![]() рад/с.
рад/с.
Б. Графічний метод визначення кутових швидкостей
Визначаємо розміри планетарного механізму:
![]() мм;
мм;
![]() мм;
мм;
![]() мм.
мм.
Визначаємо коефіцієнт корисної дії (ККД).
При
ведучому колесі і U1H > 1 приймаємо ККД пари зубчастих коліс оберненого
механізму ![]() Тоді
Тоді
![]() [8]
[8]
ККД планетарного механізму визначаємо за формулою [8]
 .
.
Схему механізму викреслюємо з масштабним коефіцієнтом ml=r1/L(r1)=0.027/10.8=0.0025 м/мм.
Графічний метод зводиться до побудови трикутника лінійних швидкостей кожного колеса і находження з них ωі.
Колова швидкість колеса Z1:
VА = ω1×r1 = 146.6×0.027=3.96м/с.
Пряма
ОА′ утворює з вертикаллю кут ![]() і є лінією розподілу швидкостей
точок на радіусі колеса
і є лінією розподілу швидкостей
точок на радіусі колеса ![]() . Колесо
. Колесо ![]() є нерухоме, тому через точку O
проходить вісь миттєвого обертання блока сателіта з колесом
є нерухоме, тому через точку O
проходить вісь миттєвого обертання блока сателіта з колесом ![]() .
.
На
блоці коліс відомі швидкості точок O і B, тому B’A’ є прямою розподілу
швидкостей для коліс ![]() і
і ![]() , які утворюють кут
, які утворюють кут ![]() з вертикаллю. Швидкість
осі О2 колеса виражається відрізком BB’. З’єднуючи точку B’ і вісь О, знаходимо
пряму розподілу швидкостей для водила Н, яка утворює кут
з вертикаллю. Швидкість
осі О2 колеса виражається відрізком BB’. З’єднуючи точку B’ і вісь О, знаходимо
пряму розподілу швидкостей для водила Н, яка утворює кут ![]() з вертикаллю.
з вертикаллю.
Для отримання наочного уявлення про кутові швидкості коліс планетарного механізму будуємо діаграму кутових швидкостей.
Проводимо
довільну горизонтальну лінію. З точки F, яка відкладається на довільній
відстані від цієї лінії, під відповідними кутами ![]() ,
, ![]() ,
, ![]() до вертикалі, проводимо промені
до перетину з цією лінією. Отримуємо точки перетину d, c, b, a, які визначають
відрізки dc, cb, ca, довжина яких пропорційна кутовій швидкості відповідних
ланок.
до вертикалі, проводимо промені
до перетину з цією лінією. Отримуємо точки перетину d, c, b, a, які визначають
відрізки dc, cb, ca, довжина яких пропорційна кутовій швидкості відповідних
ланок.
Масштаб залежить від довжини відрізка cF.
Довжина вектора (АA′) колової швидкості VA прийнята 60 мм, а відрізок (cF) = 30мм.
Тоді масштабний коефіцієнт:
mv = VA / (A′1A1) = 3.96/60=0.066(м/с)/мм.
На
кресленні діаграми кутових швидкостей коліс знаходимо масштабний коефіцієнт ![]() , що
розраховується за формулою:
, що
розраховується за формулою:
![]() ;
;
 .
.
З креслення знаходимо довжини відрізків:
cd =-23.89 мм, ca = 164.01 мм, cb = 18.41 мм.
![]() рад/с;
рад/с;
![]() рад/с;
рад/с;
![]() рад/с;
рад/с;
![]() рад/с.
рад/с.
6. Визначення похибок при визначенні кутових швидкостей отриманих графічним і аналітичним методами
 ;
;
 ;
;
 ;
;

Література
1.Артоболевський И.И. Теория механизмов и машин. – М: Наука, 1988. – 640 с.
2.Теория механизмов и машин / Фролов К.В., Попов С.В. Мусатов А.К. и др.; Под ред. К.В.Фролова.–М.: Высш. шк., 1987.–496с.
3.Заблонский К.И., Белоконев И.М., Щекин Б.М. Теория механизмов и машин.–К.: Вища школа, 1989.–370с.
4.Курсовое проектирование по теории механизмов и машин / Кореняко А.С., Кременштейн Л.И., Петровский С.Д. и др.; Под ред. А.С. Кореняко.–К: Вища школа, 1970.–330с.
5. Попов С.А., Тимофеев Г.А. Курсовое проектирование по теории механизмов и машин.–М.: Высш. шк., 1998.–351с.
6. Курсове проектування з теорії механізмів і машин: навчальний посібник / Є.І.Крижанівський, Б.Д.Малько, В.М.Сенчішак та ін.–Івано-Франківськ: 1996.–357с.
7. Теорія механізмів і машин. Механічні передачі: Навч. посібник І.І.Вишенський.–К.: НМКВО, 1992.–356с.
8. Мохнатюк А.І. Синтез кулачкових механізмів на ЕОМ: Навч. посібник.–К.: НМКВО, 1992.–188с.
9. Синтез планетарних передач на ЕОМ. Навчальний посібник до курсового проектування з дисципліни “Теорія механізмів і машин “ / А.І. Мохнатюк.–Вінниця: ВДТУ, 1997.–73с.
10. Кіницький Я.Т. Теорія механізмів і машин. Підручник.–К.: Наукова думка, 2002.–660с.
11. Вірник М.М. Курсове проектування з теорії механізмів і машин.–Вінниця: ВДТУ, 2002.–230с
 |
||
| НОВОСТИ |  |
|
|
||
| ВХОД | |
|
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||