|
Курсовая работа: Расчет и проектирование механизма поворота руляКурсовая работа: Расчет и проектирование механизма поворота руляМинистерство образования и науки УкраиныНациональный аэрокосмический университет им Н.Е. Жуковского«ХАИ» Кафедра 202 Пояснительная записка к курсовому проекту дисциплина Конструирование машин и механизмов Расчет и проектирование механизма поворота руля Исполнитель: студент В.Н. Полищук Харьков - 2005 Реферат Данный проект является первой конструкторской работой. Работа является завершающим этапом в цикле базовых общетехнических дисциплин. Основными задачами являются: 1. расширить и углубить знания, полученные при изучении предшествующих курсов; 2. усвоить принцип расчета и конструирования типовых деталей и узлов; 3. ознакомиться с ГОСТами и т.п. В ходе курсового проекта были спроектированы механизм поворота плеча (модуль 2), коническая передачи одноступенчатого конического редуктора и дополнительная клиноременная передача, проведены проверочные расчеты шестерни и колеса конической передачи, а также быстроходного и тихоходного валов, болтовых соединений. В ходе расчетов были разработаны следующие чертежи: сборочный чертеж одноступенчатого конического редуктора с дополнительной клиноременной передачей и его основных узлов – тихоходного вала и зубчатого конического колеса. Исходные данные Угол поворота Угловая скорость поворота
Частота вращения
электродвигателя Момент сопротивления
повороту плеча Срок службы Введение Манипуляционный робот содержит две органически связанные части устройство управления и манипулятор. Устройство управления включает в себя чувствительные устройства, элементы обработки и хранения информации, устройство управления приводами. Манипулятор с точки зрения механики и теории механизмов - сложный пространственный управляемый механизм с несколькими степенями свободы, содержащий жесткие и упругие звенья, передачи и приводы. Движения манипулятора осуществляется от приводов, которые могут располагаться на подвижных звеньях или на подвижном основании. Число приводных двигателей обычно равно числу степеней свободы манипулятора, хотя во время выполнения технологических операций на систему могут накладываться дополнительные связи. Передача движения от двигателя к звеньям механизма выполняется с помощью передаточных механизмов различного вида. Система таких механизмов при расположении приводов на основании может быть достаточно сложной. Технологические возможности и конструкцию промышленных роботов определяют следующие основные параметры: грузоподъемность, число степеней подвижности, форма и размеры рабочей зоны, погрешность позиционирования и тип системы управления. В машиностроении используют принципы агрегатно-модульного построения промышленных роботов. Агрегатный модуль - это функционально и конструктивно независимая единица, которую можно использовать индивидуально и в соединении с другими модулями с целью создать промышленные роботы с заданными компоновочными схемами, характеристиками и типом устройства управления. Рассмотрим промышленный робот для обслуживания станков с числовым программным управлением ЧПУ М20П 40.01 с агрегатно-модульным принципом построения. Он предназначен для автоматизации операции «установка-снятие» заготовок и деталей, смены инструмента и других вспомогательных операций при обслуживании станков с ЧПУ. Промышленный робот включает в себя следующие механизмы различного исполнения: поворота (М1); подъема и опускания (М2); выдвижения руки (М3);поворота кисти руки (М4). ЧПУ позиционного типа обеспечивает управление перемещением руки в цилиндрической системе координат, цикловое управление движениями кисти и зажимом-разжимом схвата, подачу команд пуска циклов работы станков и другого технического оборудования, а также прем ответных команд после выполнения этих циклов. Механизм поворота руля робота (модуль М2) содержит электродвигатель постоянного тока, зубчато-ременную и коническую передачи. Задание на курсовой проект включает в себя упрощенную кинематическую схему механизма робота. Кинематическая схема фактически снимает необходимость обоснования выбора типа механической передачи. Однако для того чтобы решить, какой передаточный механизм предпочтительнее, необходимо учесть условия работы, допускаемые габариты, расходы на технологичность конструкции, стоимость механизма и ряд других факторов. Список условных обозначений, символов, сокращений
1. Определение основных параметров сборочного узла 1.1Определение мощности двигателя и элементов исполнительного органаМощность двигателя определяется, как
где
По рассчитанной мощности
выбираю двигатель Из конструкторских соображений я выбрала двигатель типа ПСПТ-12. Таблица 1 – Параметры двигателя ПСПТ-12
1.2 Определение передаточного отношения редуктора Истинное передаточное отношение редуктора находим по формуле:
Разбиваем передаточное отношение на ступени
где
2. Расчет зубчатой ременной передачи Перспективным видом гибкой связи являются зубчатые ремни. Они имеют высокую тяговую способность и сравнительно большой КПД. Передачи этого типа работают без смазки, устойчивы к действию абразивных и агрессивных сред, просты в эксплуатации. В отличие от плоских, клиновых и поликлиновых передач в зубчатых ременных передачах движение передается посредством сил трения, а также зацеплением ремня и шкивов, т.е. устанавливается достаточно жесткая кинематическая связь между ведущими и ведомыми звеньями механизмов.
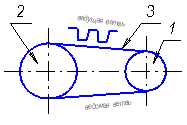
Простейшая передача с зубчатым ремнем состоит из ведущего 1, ведомого 2 шкивов и охватывающего их зубчатого ремня 3. Расчет зубчатоременной передачи ведем в следующей последовательности. 1. Определяем момент, мощность и частоту вращения на ведомом шкиве зубчатоременной передачи: - вращающий момент на ведущем шкиве:
- момент - частота вращения - мощность 2. По величине крутящего
момента на ведущем шкиве выбираем модуль зубчатого ремня 3. Определяем число
зубьев малого (ведущего) шкива. По 4. При выбранном
передаточном отношении
5. Диаметры делительных окружностей шкивов рассчитываем по формулам:
6. Вычисляем скорость
ремня
7. Действительная частота вращения ведомого шкива
Уточненное передаточное отношение
8. Межосевое расстояние вычисляем по формуле:
9. Определяем требуемую длину ремня при заданном межосевом расстоянии
10. Определяем число
зубьев ремня
Принимаем
11. Силу, передаваемую зубчатым ремнем, вычисляем по формуле:
Коэффициент 12. Расчетную допускаемую удельную силу на ремне определяем по зависимости:
где
13. Определяем числа зубьев ремня, находящихся в зацеплении с ведущим и ведомым шкивами:
Таким образом,
14. Определяем необходимую ширину ремня:
где
Принимаем ширину ремня в
соответствии со стандартным рядом 15. Рассчитываем удельные
давления на рабочих поверхностях зубьев ремня и сравниваем их с допустимыми
где Из 16. Величину начального
натяжения ремня
17. Силу, действующую на вал передачи, определяем по формуле:
18.Для динамического анализа зубчатой ременной передачи рассчитываем критическую линейную скорость ремня в такой последовательности: а) по
б) определяем натяжение ведущей и ведомой ветвей ремня:
в) определяем деформацию одного шага ведущей и ведомой ветвей ремня:
т.к. Таким образом,
г) находим критическую скорость зубчатого ремня
Получаем для ведущей ветви
для ведомой цепи
Скорость ремня Полученные в результате расчета основные параметры стандартного зубчатого ремня и шкивов сведем в табл.2. Таблица 2 - Основные параметры зубчатого ремня и шкивов
Страницы: 1, 2 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 ,
, .
.
 .
. ;
; .
. .
. .
. ,
, .
. ,
, .
. ,
,
 ;
; .
.