|
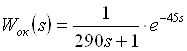
Дипломная работа: Автоматизація котельні на ТЗВ "Волинь-Шифер"Рис. 8. Графік нормованої кривої - за кривою визначити параметри об’єкта керування: 1. усталене значення вихідної величини: Хуст = 1; 2. динамічний коефіцієнт підсилення: К = 1; 3. постійна часу об'єкта: T = 290с; 4. запізнення: τ = 45с; - визначити передаточну функцію об’єкта керування; З графіка перехідної характеристики видно, що передаточна функція котла має такий вигляд:
При підстановці даних отриманих з перехідної характеристики отримаємо таку передаточну функцію котла:
3.6.2 Розрахунок настроювань регулятора одноконтурної АСР тиску пари Теоретично у системі з запізненням, мінімальний час регулювання: tpmin = 2 τ. Нижче приведені рекомендації з вибору закону регулювання і типу регулятора, виходячи з величини відношення запізнення τ до постійної часу об'єкта Т. Якщо τ /T < 0,2, то можна вибрати релейний, неперервний або цифровий регулятори. Якщо 0,2 < τ /T < 1, то повинен бути обраний неперервний або цифровий ПІ-, ПД-, ПІД-регулятор. Якщо τ /T > 1, то вибирають спеціальний цифровий регулятор, що компенсує запізнення в контурі керування. Однак цей же регулятор рекомендується застосовувати і при менших відношеннях τ /Т. На параметри об'єкта значний вплив чинить взаємне розташування виконавчих механізмів, регулюючих органів (наприклад, тена) і первинного перетворювача (давача). Наявність запізнення об'єкта різко погіршує динаміку замкнутої системи. Часто при відношенні τ /T > 0,5 типові закони керування не можуть забезпечити високу точність і швидкодію процесу регулювання. Головною причиною тут є різке зниження критичного коефіцієнта підсилення системи при збільшенні запізнення в об'єкті керування. У зв'язку з цим підвищити якість керування можна або шляхом зменшення запізнення в об'єкті, або за рахунок застосування регулятора більш складної структури, а саме оптимального регулятора. З теорії оптимального керування випливає, що такий регулятор у своїй структурі повинен містити модель об'єкта керування. Системи керування з моделлю об'єкта мають можливість вгадувати майбутні зміни стану об'єкта. Вони можуть бути адаптивними чи ні і незамінні для об'єктів зі значним часом запізнення τ /T > 0,2. Для кожного об'єкта керування необхідно застосовувати регулятори з відповідним алгоритмом і законом регулювання. Це дозволяє істотно знизити втрати при функціонуванні об'єкта (витрата енергії, втрати продукції тощо). Оскільки в нашому випадку τ/T=45/290=0,15 то вибираємо неперервний ПІД-регулятор. Найбільш розповсюдженим видом регулювання є ПІД-закон регулювання, який забезпечує достатньо високу точність при керуванні різноманітними процесами. ПІД-регулятор виробляє вихідний сигнал, який являється сумою трьох складових: 1) пропорційної; 2) інтегральної; 3) диференційної. Пропорційна складова залежить від роз погодження і відповідає за реакцію на миттєву помилку регулювання. Інтегральна складова являє собою накопичену похибку регулювання, яка є додатковим джерелом вихідної потужності та дозволяє добитися максимальної швидкості досягнення уставки при відсутності пере регулювання. Диференційна складова залежить від швидкості зміни відношення різниці між двома сусідніми вимірюваннями та часом між цими вимірюваннями, як викликає реакцію регулятора на різку зміну параметра, що вимірюється, яка може виникнути в результаті зовнішньої дії. При настроюванні регуляторів можна одержати досить велике число перехідних процесів, що задовольняють заданим вимогам. Таким чином, з'являється деяка невизначеність у виборі конкретних значень параметрів настроювання регулятора. З метою ліквідації цієї невизначеності і полегшення розрахунку настроювань вводиться поняття оптимальних типових процесів регулювання. Регулятор, включений в АСР, може мати кілька настроювань, кожне з яких може змінюватися в досить широких межах. При цьому при визначених значеннях настроювань система буде керувати об'єктом відповідно до технологічних вимог, при інших може привести до нестійкого стану. Тому для визначення оптимальних настроювань розроблений ряд математичних методів, серед яких можна виділити: - метод сканування площини настроювань; - метод D-розбиття; - формульний метод. Метод сканування полягає у розбитті області припустимих настроювань обраного регулятора з рівним кроком і визначенні показників якості для кожного набору настроювань у вузлах сітки, що вийшла. Після перегляду усіх вузлів вибираються набори настроювань, що відповідають найкращим показникам якості. Настроювання можуть бути уточнені далі також шляхом сканування околиці обраного вузла з більш дрібним кроком. Метод D-розбиття полягає у визначенні області настроювань у просторі припустимих значень настроювань обраного регулятора, що відповідають області стійкості чи заданому показнику якості. Крива D-розбиття являє собою границю стійкості в просторі настроювань і тому будується з використанням якого-небудь критерію стійкості. Формульний метод визначення настроювань регуляторів використовується для швидкої і наближеної оцінки значень настроювань регуляторів. Виділяють три типових процеси регулювання: 1. Аперіодичний процес з мінімальним часом регулювання. 2. Процес з 20% - ним перерегулюванням. 3. Процес, що забезпечує мінімум інтегральної оцінки якості. Настроювання ПІД - регуляторів можуть бути визначені за наведеними у таблиці формулами в залежності від того, який вид перехідного процесу потрібно одержати. У другому стовпчику таблиці приведені формули для аперіодичного процесу без перерегулювання, у третьому – з перерегулюванням 20%, у четвертому – для процесу з максимальною швидкодією (процес може бути сильно коливальним).
Відповідно до вимог технологічного процесу вибираємо процес з 20 % перерегулюванням і відповідно до нього маємо такі параметри настроювання ПІД-регулятора:
Дані параметри вводимо в модель нашої системи, структурна схема якої наведена на рис.9.
Провівши моделювання, отримаємо таку перехідну характеристику
Рис. 10. Графік перехідного процесу регулювання витрати З графіку перехідного процесу визначаємо прямі показники якості: - перерегулювання – 14%; - час регулювання – 200с; - кількість коливань – 1; - усталена похибка – 0. 3.6.3 Розрахунок оптимальних настроювань регулятора АСРОптимальними настроюваннями регулятора називаються настроювання, що відповідають мінімуму (чи максимуму) якого-небудь показника якості. Вимоги до показників якості встановлюються безпосередньо, виходячи з технологічних. Однак, змінюючи настроювання таким чином, щоб збільшити ступінь затухання, ми можемо прийти до занадто великого часу регулювання, що є недоцільним. І навпаки, прагнучи зменшити час регулювання, ми одержуємо більш коливальні процеси з великим значенням коливальності. Для визначення оптимальних настроювань регулятора скористаємося програмою MatLab, зокрема її пакетом NCD. За допомогою даного пакету можна настроювати параметри моделі, в якості яких може бути довільна кількість змінних. Задання динамічних обмежень здійснюється у візуальному режимі, а хід оптимізації – на екрані за допомогою відображення графіка перехідного процесу і поточних значень функції, що оптимізується. За початкові умови задамо параметри ПІ-регулятора знайдені у попередньому розділі і за допомогою NCD-блока знайдемо оптимальні параметри настройки ПІ-регулятора. На рис. 11 зображено структурна схема за допомогою якої здійснюємо пошук оптимальних настроювань регулятора, а на рис.12 – графік перехідного процесу з оптимальними настроюваннями регулятора, які рівні: К0=0.7427 К1=0.0020453 К2=11.611
Рис.11. структурна схема оптимальних настроювань регулятора
Рис. 12. Графік перехідного процесу з оптимальними настроюваннями регулятора З графіку перехідного процесу визначаємо прямі показники якості: - перерегулювання –1%; - час регулювання – 140с; - коливальність – 0; - усталена похибка – 0. Висновок: провівши пошук настроювань регулятора за допомогою блоку NCD, ми знайшли оптимальні настройки ПІД-регулятора. Для пропорційної складової вони рівні 0,7417, для інтегральної – 0,0020453, а для диференційної складової — 11,611. 3.7 Розробка SCADA-системи TRACE MODE TRACE MODE (ТРЕЙС МОУД) – це найбільш поширена SCADA-система в країнах СНД. Вона призначена для розробки великих розподілених АСКТП широкого призначення. ТРЕЙС МОУД створена в 1992 році фірмою AdAstra Research Group Ltd. (Росія) і до теперішнього часу має більш ніж 4500 інсталяцій. Системи які розроблені на базі ТРЕЙС МОУД працюють в енергетиці, металургії, нафтовій, паливній, хімічній і інших галузях промисловості та у комунальному господарстві. По числу впроваджень ТРЕЙС МОУД значно випереджає закордонні пакети подібного класу. ТРЕЙС МОУД – заснована на інноваційних технологіях, що не мають аналогів. Серед них: розробка розподіленої АСКТП як єдиного проекту, автопобудова, оригінальні алгоритми обробки сигналів і керування, об'ємна векторна графіка мнемосхем, єдиний мережевий час, унікальна технологія playback – графічного перегляду архівів на робочих місцях керівників. ТРЕЙС МОУД – це перша інтегрована SCADA- і softlogic-система, що підтримує наскрізне програмування операторських станцій і контролерів за допомогою єдиного інструменту. Основними функціями ТРЕЙС МОУД є: · Модульна структура - від 128 до 64000х16 точок введення/виведення; · Кількість тегів необмежена; · Мінімальний цикл системи рівний 0,001 с; · Відкритий формат драйвера для зв'язку з будь-яким УСО. · Відкритість для програмування (Visual Basic, Visual C++ і т.д.); · Вбудовані бібліотеки з більш ніж 150 алгоритмами обробки даних і керування в т.ч. фільтрація, PID, PDD, нечітке, адаптивне, позиційне регулювання, ШІМ, керування пристроями (клапан, засувка, привод і т.д.), статистичні функції і довільні алгоритми; · Автоматичне гаряче резервування; · Підтримка єдиного мережевого часу; · Засоби програмування контролерів і АРМ на основі міжнародного стандарту IEC 1131‑3; · Більш ніж 200 типів форм графічного відображення інформації в т.ч. тренди, мультиплікація на основі растрових і векторних зображень, Active; · Перегляд архівної інформації в реальному часі в т.ч. у виді трендів і таблиць; · Мережа на основі Netbios, NetBEUI, IPX/SPX, TCP/IP; · Автоматичне резервування архівів і автовідновлення після збою; · Моніторинг і керування через Internet; · Технічна підтримка на російській мові. · ТРЕЙС МОУД 5 представляє нове покоління засобів проектування АСКТП. Основні відмінності від технологій реалізованих у старих SCADA-системах зводяться до наступних трьох ключових технологій: · Єдині інструментальні засоби (єдина лінія програмування), як для розробки операторських станцій, так і для програмування контролерів. Єдина база даних реального часу для операторських станцій і контролерів; · Розробка розподіленої АСКТП як єдиного проекту. Єдина розподілена база даних реального часу; · Автопобудова проекту. Трейс Моуд 5 включає в себе дві основні програми: 1. Редактор бази каналів 2. Редактор представлення даних Про призначення і можливості кожної з них розглянуто нижче. 3.7.1Розробка АСКТП за допомогою редактора бази каналів Trace Mode У редакторі бази каналів створюється математична основа системи керування: описуються конфігурації всіх робочих станцій, контролерів і УСО, використовуваних в системі керування, набудовуються інформаційні потоки між ними. Тут же описуються вхідні і вихідні сигнали і їхній зв'язок із пристроями збору даних і керування. У цьому редакторі задаються періоди опитування або формування сигналів, набудовуються закони первинної обробки і керування, технологічні границі, структура математичної обробки даних. Тут встановлюється, які дані, і при яких умовах зберігати в різних архівах, набудовується мережний обмін, описуються задачі керування архівами, документуванням, корекції тимчасових характеристик системи керування, а також зважуються деякі інші задачі. Проект автоматизації в ТРЕЙС МОУД являє собою сукупність вузлів, об'єднаних між собою інформаційними зв'язками. Створення і настроювання параметрів окремих вузлів проекту здійснюється у вікні редагування структури проекту редактора бази каналів. Каналом у Трейс Моуд називається інформаційна структура, що включає в себе сукупність перемінних, методів формування і перетворення чисельних значень цих перемінних, а також ряд констант. Значення основних перемінних визначають значення каналу. Константи визначають методи і режими формування, перетворення й архівування значень перемінних каналу. У каналі Трейс Моуд можна виділити п'ять складових: · Три значення: o апаратне o реальне o користувальницьке · дві процедури: o трансляція o перетворення. Процедура трансляції зв'язує між собою апаратне і реальне значення одного каналу, а процедура перетворення – користувальницьке значення даного каналу з реальним значенням одного чи декількох каналів. Даний проект автоматизації складається з двох вузлів: · Контролера Lagoon (модуль аналогового вводу-виводу ІС 7017) · Автоматизованого робочого місця (МРВ, мережа, М-link) У вікні редактора бази каналів об’єкти будуть відображатися в такому вигляді:
Рис. 13 Об’єкти проекту У цьому вікні редактора бази каналів можна здійснювати редагування об'єктів і каналів, що входять у них. Тут же можна зробити налагодження алгоритмів перерахування окремих каналів, об'єктів і всієї бази. Для цього передбачені засоби емуляції роботи в реальному часі. База каналів даного технологічного процесу включає в себе наступні канали, кожному з яких відповідає конкретна вимірювана величина: · система “паливо-повітря” вході системи; · подача палива відносно тиску пари на виході; · тиск пічних газів; · подача палива; · витрата повітря на вході системи; · рівень води в резервуарі. Для всіх каналів контролера задаються назва, розмірність, коментар, прапор доступу, значення, яке відпрацювати при старті, а також проставляються граничні значення. Подвійне натискання лівою кнопкою миші на зображенні об'єкта у вікні редагування бази каналів виведе на екран діалог “Каналы объекта”:
Рис.1.4 Канали об’єкту Цей діалог дозволяє редагувати атрибути каналів даного об'єкта, а також додавати і видаляти канали з поточного об'єкта чи з бази каналів взагалі. 3.7.2 Розробка алгоритмів обробки інформації і керування за допомогою мови техно-FBD Для реалізації складних алгоритмів обробки даних і керування в ТРЕЙС МОУД передбачені дві мови програмування – Техно FBD і Техно IL. Вони є розширенням відповідних мов міжнародного стандарту МЭК 1131-3. Мова Техно FBD призначена для програмування алгоритмів у виді діаграм функціональних блоків. Розроблені на ній програми можуть викликатися з процедур каналів. Програми мовою Техно IL записуються у виді структурованого тексту. Ця мова дозволяє створювати власні функціональні блоки для мови Техно FBD, а також писати метапрограми, що запускаються паралельно з перерахуванням бази каналів. Метапрограми можуть використовувати і формувати значення атрибутів каналів і обмінюватися даними між собою. Для розробки і налагодження FBD-програм передбачене спеціальне вікно редактора бази каналів. Вхід у нього здійснюється натисканням лівої кнопки миші на відповідній іконці панелі інструментів, командою "FBD программы" з меню "Окна" чи натисканням сполучення клавіш ALT-3. При цьому на екрані з'явиться діалог "FBD программа". В цьому діалозі можна вибрати програму для редагування, створити нову або видалити існуючу, зберегти її в файл чи завантажити з файлу, а також ввести чи відредагувати коментар до програми, змінити ім'я, задати тип програми. Створимо програми регулювання:
Рис. 15 Створення програм регулювання у вікні “FBD программа” Для редагування створених FBD програм натиснемо кнопку "Редактировать". З’явиться вікно редагування FBD-програм наступного вигляду:
Рис 16. Вікно редагування FBD-програм У вікні редагування FBD-програм редактора бази каналів здійснюється створення і редагування задач обробки даних і керування, оформлених у виді окремих FBD-програм мовою Техно FBD. Тут у робочій області редактора виводиться діаграма функціональних блоків, що реалізують необхідну функцію, список внутрішніх перемінних і діалог керування редагуванням. Після редагування, FBD програми будуть мати такий вигляд:
Рис. 17 FBD програма регулювання “прямо” де: модулі * - сумують сигнали які надходять до них по IN1 та IN2 і надсилають їх до модулю +(4); модуль +(4) - сумує всі сигнали та подає в такому вигляді на вихід. Входи AD1,AD2 – вихідні сигнали модулів *, AD3 – тип константа, коментар-зона нечутливості, AD4 – тип константа, коментар – коефіцієнт біля пропорційної складової.
Рис. 18 FBD-програма регулювання random1 де: модуль RND1 (генератор випадкових чисел) - на виході формує випадкові значення в межах від 0 до 1; модуль * - виконує множення двох чисел, які надходять на його входи IN1 та IN2 (множника), модуль +(2) - здійснює арифметичне додавання двох сигналів AD1 та AD2 (аргументу на вході).
Рис. 19 FBD програма регулювання Sin де: модуль GSIN - генерує синусоїдальний сигнал в межах від –1 до 1, період коливань задається в секундах на каналі РТ цього модуля, цей сигнал надходить до модуля АВС; модуль АВС - надає вихідному сигналу абсолютне значення функціонального входу; модуль +(4) - сумує всі сигнали які до нього надходять AD1, AD2(аргумент), AD3(константу – зона нечутливості), AD4(константа). модуль * - множить два числа, які надходять на його входи IN1 та IN2. Щоб підключити ці програми до каналів вузла ARM, необхідно їх зв’язати з необхідним каналом. Для цього перейдемо в діалог “Каналы объекта” (рис. 4). Далі необхідно ввійти в діалог “Реквизиты”, двічі натиснувши ліву кнопку миші на імені потрібного каналу. Після входу в діалог “Реквизиты” треба відкрити його бланк “Трансляция” і в полі вибору FBD-програм вказати необхідну:
В цьому вікні є наступні елементи: · список вибору програми; · поле коментаря до програми; · список аргументів і констант програми; · коментар до настроюваного елементу. Для настройки будь-якого аргумента чи константи необхідно двічі натиснути ліву кнопкою миші на потрібному елементі списку. З’являться вікна настройок наступного вигляду:
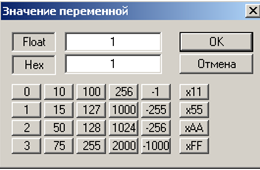
Рис. 21 Настройка константи
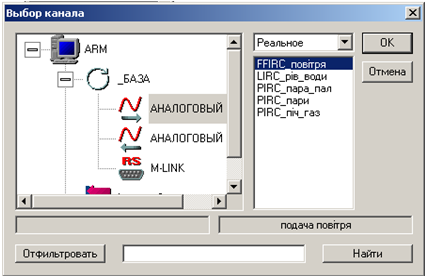
Рис. 22 Настройка параметрів аргумента 3.7.3 Розробка графічної частини проекту за допомогою редактора представлення даних Trace Mode Графічна частина проекту розробляється в Редакторі представлення даних. Вона являє собою сукупність всіх екранів для представлення даних і супервізорного керування, що входять у графічні бази вузлів проекту. Структура проекту, створена в редакторі бази каналів, завантажується в редактор представлення даних. При розробці графічної частини створюється статичний малюнок технологічного об'єкта, а потім поверх нього розміщуються динамічні форми відображення і керування: · Графіки; · гістограми; · кнопки; · області введення значень і переходу до інших графічних фрагментів. Крім стандартних форм відображення, ТРЕЙС МОУД дозволяє вставляти в проекти графічні форми, розроблені користувачами. Для цього можна використовувати стандартний механізм Active-X. Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13 |
|
|||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 (18)
(18) (19)
(19)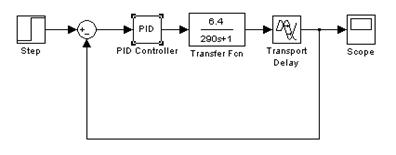
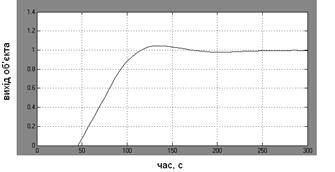
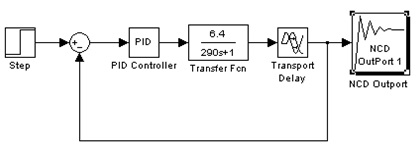
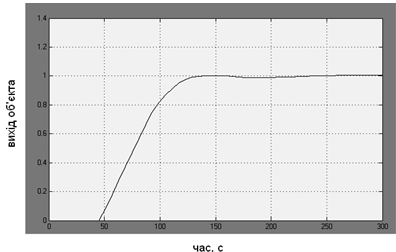
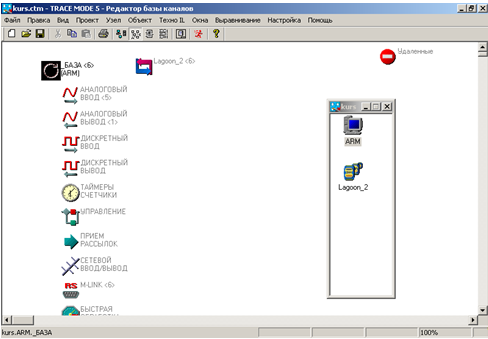
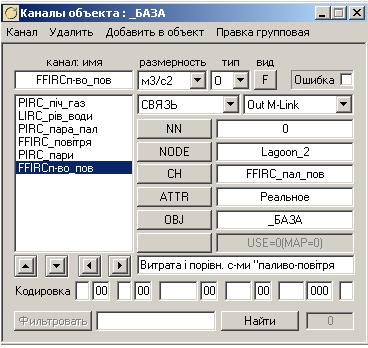
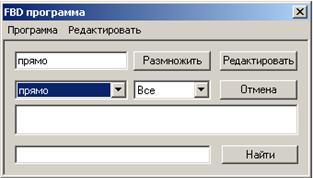
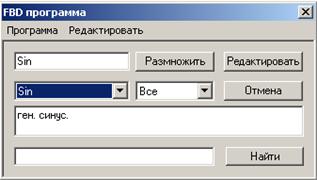
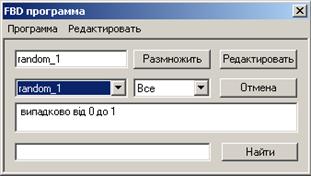
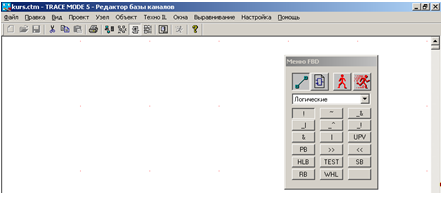
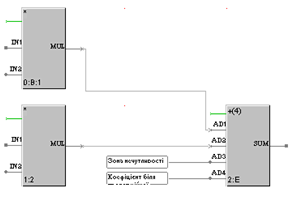
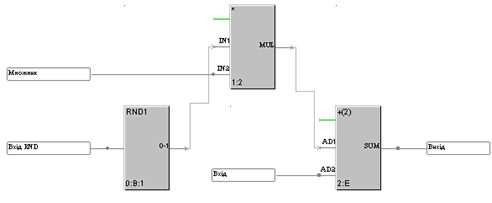
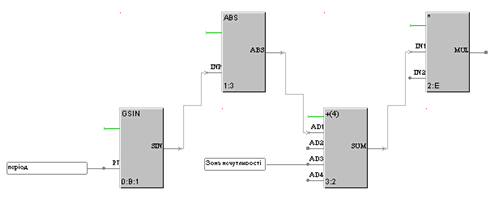
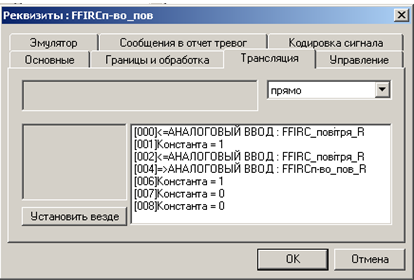 Рис. 20 Підключення FBD-програм до
каналів вузла ARM
Рис. 20 Підключення FBD-програм до
каналів вузла ARM