|
Курсовая работа: Механізм приводу щокової дробарки
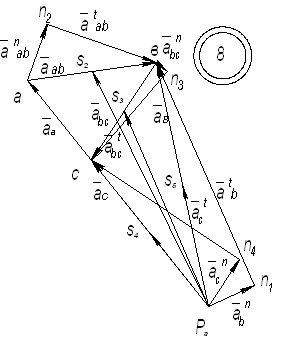
Знаходимо прискорення точки A aA = w12·lOA = 13,42·0,14 = 25,14 м/с2 . В довільному масштабі з довільної точки Ра паралельно кривошипу АО в напрямку, який співпадає з напрямком від точки А до т.О (так,як доцентрове прискорення) відкладаємо відрізок Раа, який зображує прискорення точки А. Знаходимо масштаб плана прискорень: ma = a/(Paa) = 25,14/100 =0,2514 (м/с2)/мм Для знаходження прискорення точки B, запишемо систему векторних рівнянь: aB = aA + aBAt + aBAn ; аB = aC + aВCn + aВCt . Для побудови прискорення точки B на плані прискорень виконуємо слідуючі операції : з точки а відкладаємо відрізок аn2 , що відповідає нормальному рискоренню ланки АВ - aBAn , паралельно АВ в напрмку від В до А, аналогічно з точки Ра відкладаємо відрізок Раn3, паралельно ВО3 в напрямку від В до О; він відповідає нормальному прискоренню ланки ВО3 a BО3n . Довжини відрізків, що показують нормальні прискорення aBAn і a BО3n обчислюємо користуючись такими виразами : aАВn = VAB2 / lAВ = 2,482/1,2= 5,12м/с2 ; аn2 = aАВn /ma = 5,12/0,2514 = 20,37 мм ; aBО3n = VBО32/l BО3= 2,182 /1,1 = 4,32 м/с2 ; Раn5 = aВО3n /ma = 4,32/0,2514 = 17,18 мм ; Точку b на плані прискорень отримуємо на перетині ліній, що показують тангенціальні прискоренн ланок АВ і ВО3, тобто на перетині лінії, що виходить з точки n2 перпендикулрно до АВ і лінії, що виходить з точки n3 перпендикулрнодо ВО3 . Сполучивши точки a і b отримуємо вектор, що зображає прискорення ланки АВ . aВСn = VBС2 / lВС = 1,182/1,2 =1,16м/с2 ; аn3 = aВСn /ma = 1,16/0,2514 =4,61 мм ; aСО3n = VО4С2/l О4С= 1,982/0,8 =4,9м/с2 ; Раn4 = aО4Сn /ma = 4,9/0,2514 =19,49мм ; На лініях, що показують прискорення ланок відкладаємо центри ваги ланок, користуючись такими співвідношеннями : (AS2) = 0,5 AB (CS3) = 0,5 BC (BS4) = 0,5 BD Сполучивши отримані точки з точкою Ра отримуєм вектори, що показують прискорення центрів ваги ланок Знаходимо дійсні значення прискорень: Дійсні значення прискорень отримуємо перемноживши довжини відповідних векторів, взятих з креслення, на відповідні масштабні коефіцієнти : aS2 = (PaS2)×ma = 90,45·0,2514 =22,73м/с2 aS3 = (PaS3)×ma = 73,28·0,2514 =18,42м/с2 aS4 = (PaS4)×ma = 32,36·0,2514 =8,135м/с2 aS5 = (PaS5)×ma = 42,35·0,2514 =10,65м/с2 аАВt =(n2b)×ma= 40,16·0,2514 =10,1м/с2 ; аВCt=( n3c )× ma= 40,36·0,2514 = 10,15м/с2 . аО3Вt=( b n1 )× ma= 84,13·0,2514 = 21,15м/с2 . аО4Сt =( n4c )× ma=85,89·0,2514 =21,6 м/с2 . Знаходимо кутову швидкість обертання ланки АB: e2 = аAВt/lAВ = 10,1/1,2 = 8,42 рад/с2 . Значення прискорень точок і ланок
Визначення радіуса кривизни траєкторії точки S2 Радіус кривизни ρ точки S2 для 8-го положення механізму визначаємо з формули нормального прискорення цієї точки:
звідси
Глава 2. Силове дослідження шарнірно-важільного механізму 1. Кінетостатичне дослідження механізму Задачі кінетостатичного дослідження: а) Знаходження зовнішніх сил, які діють на ланки механізму; б) знаходження реакцій у кінематичних парах, тобто сил взаємодії ланок; в) знаходження зрівноважуючої сили або момента, прикладених до ведучої ланки механізму. Вихідні дані. Маса: - m1=(LAО1×q)=(0,14×70)= 9,8кг ; - m2=(LAB×q)=(1,2×70)=84 кг ; - m3 = (LBС×q)=(1,2×70)=84 кг ; - m4 =(LО4С×q)=(0,8×70)=56 кг ; - m5=(LО3В×q)=(1,1×70)=77 кг. Моменти інерції :
Визначаємо зовнішні невідомі сили, реакції в кінематичних парах та зрівноважені сили або моменти. Визначаємо сили, що діють на дану групу. Визначаємо сили тяжіння:
Момент корисного опору. Мmах = 1×104Н/м . Розрахуємо момент корисного опору для 8-го положення механізму.
Розрахуємо силу корисного опору для 8-го положення механізму.
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 ,
, = 1,612/13,63
= 0,19 м.
= 1,612/13,63
= 0,19 м.