|
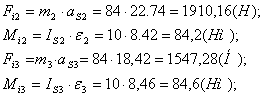
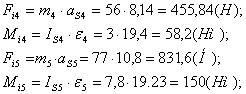
Курсовая работа: Механізм приводу щокової дробаркиВизначаємо сили інерції і моменти сил інерції.
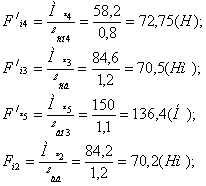
Розкладемо моменти сил інерції на пари сил
Силове дослідження групи 4-3. Реакції
починаємо визначати з тангенціальної складової Для ланки 4.
Для визначення номінальної складової реакції
Для
визначення невідомої Для побудови силового багатокутника приймаємо масштаб:
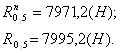
З плану сил
4.Силове дослідження групи Ассура, що складається з ланок 5-2. Визначаємо
реакції з тангіціальної складової Для ланки 2.
Для ланки 5.
Для
визначення нормальних складових реакцій Для
визначення невідомих
Для
побудови силового багатокутника приймаємо масштаб З силового багатокутника отримуємо
2. Силове дослідження механізму першого класу Знайдемо зрівноважену силу. Оскільки
кривошип кріпиться до зубчатого колеса, то
Отже
Визначаємо зрівноважену силу методом важеля Жуковського. Повертаємо план швидкостей на 900, і записуємо суму моментів сил, що діють на важіль Жуковського.
Порівняємо
Глава 3. Визначення моменту інерції маховика 1. Побудова графіка зведеного моменту сил опору Вихідні дані: - схема механізму без маховика; - маси і моменти інерції ланок:
-
середня кутова швидкість ведучої ланки -
коефіцієнт нерівномірності руху - графік зведених моментів сил; - графік зведених моментів інерції. 1. Будуємо графік зведених моментів сил. Дані для побудови графіка беремо з таблиці
2. Побудова графіка робіт сил опору Для цього застосуємо метод графічного інтегрування графіка зведених моментів сил. Послідовність інтегрування: - вибираємо полюс інтегрування Р на відстані Н=50 мм від осі ординат на продовженні вісі абсцис; - будуємо ординату, яка відповідає середині інтервалу 0-1, проектуємо її на вісі ординат і з’єднуємо точку 1’ ординати 01’ з полюсом Р; - теж саме робимо на наступних інтервалах; - з точки 0’ навої осі координат проводимо відрізок на інтервалі 0’1 паралельно променю Р1’ , з кінця отриманого відрізка проводимо відрізок на інтервалі 12 паралельно променю Р2’ і т.д.; - з’єднуємо отримані точки плавною кривою. Отримана крива О’К є графіком робіт сил опору. Оскільки за цикл усталеного руху робота рушійних сил дорівнює роботі сил опору, та з’єднавши т.О’ з т.К отримаємо графік робіт рушійних сил. 3. Побудова графіка надлишкової роботи Виконавши алгебраїчне сумування ординат граіфка робіт рушійних сил (беремо зі знаком “+”) та графіка робіт сил корисного опору (беремо зі знаком “-”). 4. Масштабні коефіцієнти побудови графіків
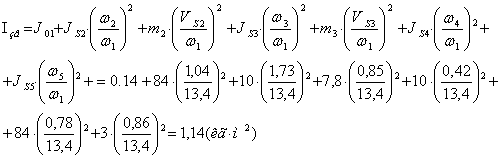
5. Побудова графіка зведених моментів інерції Ізв. Для
цього визначаємо зведений момент інерції для 12-ти положень механізму. Оскільки
умовою зведення є рівність кінетичних енергій За цією формулою знаходимо зведені моменти інерції в 12-ти положеннях. Результати заносимо в таблицю 3.1. Розрахуємо зведений момент інерції для 3-го положення механізму.
Значення зведених моментів інерції
За даними табл. 3.1 будуємо графік зведених моментів інерції, повернений на 900, в масштабі
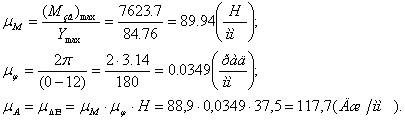
6. Побудова діаграми Віттенбауера Для
визначення момента інерції маховика необхідно сопчатку визначити максимальний
приріст кінетичної енергії
При
відомих значеннях Визначаємо момент інерції маховика:
7. Визначення геометричних розмірів маховика Оскільки за попередніми розрахунками момент інерції маховика має велике значення і розміри маховика вийдуть великими, доцільно розмістити маховик на валу електродвигуна. Тоді момент інерції маховика буде мати таке значення:
Конструктивно приймаємо, що маховик виготовлений в вигдяді диска з масою, зосередженою на ободі, момент інерції якого: Тоді зовнішній діаметр маховика розраховуємо за формулою:
де Ширина обода маховика:
Знаходимо масу маховика:
Знаходимо колову швидкість обода маховика:
Така
швидкість дрпустима для чавунних маховиків ( Глава 4. Геометричний синтез зовнішнього евольвентного нульового прямозубого зачеплення Вихідні дані:
1. Визначення геометричних параметрів зубчастого зачеплення Визначаємо крок зачеплення
Визначаємо радіуси ділильних кіл:
Визначаємо радіуси основних кіл:
Визначаємо товщини зубців:
Визначаємо радіуси западин:
Визначаємо міжосьову відстань:
Визначаємо радіуси початкових кіл:
Визначаємо висоту зубців:
Визначаємо радіуси вершин зубців:
На форматі А1 проводимо побудову зовнішнього нульового прямозубого зчеплення в такій послідовності: –
Проводимо лінію центрів і відкладаємо на ній у масштабі М 2:1 міжосьову
відстань центрову відстань – З точки О1 проводимо початкове коло для 1-го колеса радіусом R1 і З точки О2 – коло, радіусом R2. З метою збільшення масштабу побудови проводимо тільки частину кола. Також проводимо з центрів коліс основні кола, кола виступів і впадин. – До початкових кіл проводимо дотичну Т1-Т2 через полюс Р (точку дотику початкових кіл коліс) і під кутом зачеплення a=200 проводимо нормаль N1N2 (лінію зачеплення). – З центрів коліс О1 і О2 опускаємо перпендикуляри О1А і О2В на нормаль N1N2. О1А і О2В являються радіусами кіл R01 і R02. Отриманий відрізок АВ називається теоретичною лінією зачеплення. – Для побудови евольвенти першого колеса довжиною АР з точки А робимо засічку на основному колі. Отримуємо точку 1. – Дугу основного кола А-1 ділимо на три рівні частини. Точки ділення позначаємо 1, 2, 3, 4. Точка співпадає з точкою А. Продовживши ділення за точку А, отримуємо точки 5,6,7. – Отримані точки 1 – 6 з'єднуємо центром колеса О1 і проводимо дотичні до основного кола через ці точки. – З точки А радіусом АР проводимо дугу уверх до найближчої дотичної. Отримаємо точку 3'. – З точки 3 радіусом 3-3' проводимо дугу до наступної дотичної 2 і так далі до дотичної 1. – Далі точки А радіусом АР вниз від лінії зачеплення проводимо дугу до найближчої дотичної 5 і т. д., доки ця дуга не перетне коло виступів. Побудована крива буде евольвентою від основного кола до кола виступів. –
Відкладаємо в масштабі по початковому колу від полюсу Р половину товщини зуба – Частину профілю зуба, якої не вистачає, замінюємо відрізком радіальної прямої, яка з'єднує початок евольвенти з центром колеса. Після цього виконуємо стикування між прямою і колом впадин радіусом r » 0,3m » 1,8 мм. – Через полюс зачеплення Р проводимо боковий профіль першого зуба. – По початковому колу в обидві сторони від осі симетрії відкладаємо відрізки рівні кроку зачеплення р=21,98 мм. Через отримані точки ділення, проводимо осі симетрії ще двох зубів і креслимо їх профілі. – Для побудови евольвенти другого колеса довжиною ВР з точки В робимо засічку на основному колі. Отримуємо точку 1. – Дугу основного кола В-1 ділимо на чотири рівні частини. Точки ділення позначаємо 1, 2, 3, 4 . Точка 4 співпадає з точкою В. Продовживши ділення за точку В, отримуємо точки 5, 6, 7. – Отримані точки 1 – 6 з'єднуємо центром колеса О2 і проводимо дотичні до основного кола через ці точки. – Далі алгоритм побудови для другого колеса такий самий як і для першого колеса. – Контурною лінією виділяємо наступні елементи: практичну частину лінії зачеплення аb; дугу зачеплення а’b’ по початковому колу, яка обмежена двома точками, які відповідають входу і виходу їх зачеплення профілю даного зуба; робочі ділянки профілів, які отримаємо перетином кіл, проведених з центрів коліс, через точки а і b практичної лінії зачеплення, з боковими контурами зубів. |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 Для ланки 3.
Для ланки 3.




 .
.
 мм;
мм; мм.
мм. мм;
мм; мм.
мм. мм.
мм. мм;
мм; мм.
мм.
