|
Реферат: Управление техническими системами (лекции)у ® Y у’ ® sY у” ® s2Y и т.д. Определим производные ЧХ: у’(t) = jw Авыхеj(wt + j) = jw у, у”(t) = (jw)2 Авыхеj(wt + j) = (jw)2 у и т.д. Отсюда видно соответствие s = jw. Вывод: частотные характеристики могут быть построены по передаточным функциям путем замены s = jw. Пример:
При s = jw имеем:
= Изменяя w от 0 до ¥, можно построить АФХ (см. рис.). ¨
Формулы получения АФХ по АЧХ и ФЧХ: Re(w) = A(w) cos j(w), Im(w) = A(w) sin j(w). 2.7.2 Логарифмические частотные характеристики. Логарифмические частотные характеристики (ЛЧХ) используются довольно часто для описания динамических параметров различных устройств. Существуют два основных вида ЛЧХ, которые, как правило, используются совместно и изображаются в виде графиков: 1) ЛАЧХ - логарифмическая АЧХ.
Единица измерения - децибел (дБ). На графике ЛАЧХ по оси абсцисс откладывается частота в логарифмическом масштабе. Это означает, что равным величинам отрезков по оси w соответствуют кратные значения частоты. Для ЛЧХ кратность = 10. По оси ординат откладываются значения L(w) в обычном масштабе. 2) ЛФЧХ - логарифмическая ФЧХ. Представляет из себя ФЧХ, у которой ось частоты w проградуирована в логарифмическом масштабе в соответствии с ЛАЧХ. По оси ординат откладываются фазы j. Примеры ЛЧХ. 1. Фильтр низких частот (ФНЧ)
Фильтр низких частот предназначен для подавления высокочастотных воздействий. 2. Фильтр высоких частот (ФВЧ)
Фильтр высоких частот предназначен для подавления низкочастотных воздействий. 3. Заградительный фильтр. Заградительный фильтр подавляет только определенный диапазон частот ЛАЧХ и ЛФЧХ Пример цепи
. 3. Качество процессов управления. 3.1. Критерии устойчивости. 3.1.1 Устойчивость. Важным показателем АСР является устойчивость, поскольку основное ее назначение заключается в поддержании заданного постоянного значения регулируемого параметра или изменение его по определенному закону. При отклонении регулируемого параметра от заданной величины (например, под действием возмущения или изменения задания) регулятор воздействует на систему таким образом, чтобы ликвидировать это отклонение. Если система в результате этого воздействия возвращается в исходное состояние или переходит в другое равновесное состояние, то такая система называется устойчивой. Если же возникают колебания со все возрастающей амплитудой или происходит монотонное увеличение ошибки е, то система называется неустойчивой. Для того, чтобы определить, устойчива система или нет, используются критерии устойчивости: 1) корневой критерий, 2) критерий Стодолы, 3) критерий Гурвица, 4) критерий Найквиста, 5) критерий Михайлова и др. Первые два критерия являются необходимыми критериями устойчивости отдельных звеньев и разомкнутых систем. Критерий Гурвица является алгебраическим и разработан для определения устойчивости замкнутых систем без запаздывания. Последние два критерия относятся к группе частотных критериев, поскольку определяют устойчивость замкнутых систем по их частотным характеристикам. Их особенностью является возможность применения к замкнутым системам с запаздыванием, которыми является подавляющее большинство систем управления. 3.1.2 Корневой критерий. Корневой критерий определяет устойчивость системы по виду передаточной функции. Динамической характеристикой системы, описывающей основные поведенческие свойства, является характеристический полином, находящийся в знаменателе передаточной функции. Путем приравнивания знаменателя к нулю можно получить характеристическое уравнение, по корням которого определить устойчивость. Корни характеристического уравнения могут быть как действительные, так и комплексные и для определения устойчивости откладываются на комплексной плоскости (см. рис. 1.34).
- Действительные: положительные (корень № 1); отрицательные (2); нулевые (3); - Комплексные комплексные сопряженные (4); чисто мнимые (5); По кратности корни бывают: одиночные (1, 2, 3); сопряженные (4, 5): si = a ± jw; кратные (6) si = si+1 = … Корневой критерий формулируется следующим образом: Линейная АСР устойчива, если все корни характеристического уравнения лежат в левой полуплоскости. Если хотя бы один корень находится на мнимой оси, которая является границей устойчивости, то говорят, что система находится на границе устойчивости. Если хотя бы один корень находится в правой полуплоскости (не зависимо от числа корней в левой), то система является неустойчивой. Иными словами, все действительные корни и действительные части комплексных корней должны быть отрицательны. В противном случае система неустойчива. Пример 3.1. Передаточная функция системы имеет вид:
Характеристическое уравнение: s3 + 2s2 + 2.25s + 1.25 = 0. Корни: s1 = -1; s2 = -0,5 + j; s3 = -0,5 - j. Следовательно, система устойчива. ¨ 3.1.3 Критерий Стодолы. Этот критерий является следствием из предыдущего и формулируется следующим образом: Линейная система устойчива, если все коэффициенты характеристического полинома положительны. То есть, для передаточная из примера 3.1 по критерию Стодола соответствует устойчивой системе. 3.1.4 Критерий Гурвица. Критерий Гурвица работает с характеристическим полиномом замкнутой системы. Как известно, структурная схема АСР по ошибке имеет вид (см. рис.) Wp - передаточная функция регулятора,
Определим передаточную функцию для прямой связи (передаточную функцию разомкнутой системы, см. п. 2.6.4): W¥ = Wp Wy. Далее с учетом наличия отрицательной обратной связи получаем передаточную функцию замкнутой системы:
Как правило, передаточная функция разомкнутой системы имеет дробно-рациональный вид:
Тогда после подстановки и преобразования получаем:
Отсюда следует, что характеристический полином замкнутой системы (ХПЗС) можно определить как сумму числителя и знаменателя W¥: Dз(s) = A(s) + B(s). Для определения устойчивости по Гурвицу строится матрица таким образом, чтобы по главной диагонали были расположены коэффициенты ХПЗС с an+1 по a0. Справа и слева от нее записываются коэффициенты с индексами через 2 (a0, a2, a4… или a1, a3, a5 …). Тогда для устойчивой системы необходимо и достаточно, чтобы определитель и все главные диагональные миноры матрицы были больше нуля. Если хотя бы один определитель будет равен нулю, то система будет находится на границе устойчивости. Если хотя бы один определитель будет отрицателен, то система неустойчива не зависимо от числа положительных или нулевых определителей. Пример. Дана передаточная функция разомкнутой системы
Требуется определить устойчивость замкнутой системы по критерию Гурвица. Для этого определяется ХПЗС: D(s) = A(s) + B(s) = 2s4 + 3s3 + s2 + 2s3 + 9s2 + 6s + 1 = 2s4 + 5s3 + 10s2 + 6s + 1. Поскольку степень ХПЗС равна n = 4, то матрица будет иметь размер 4х4. Коэффициенты ХПЗС равны а4 = 2, а3 = 5, а2 = 10, а1 = 6, а0 = 1. Матрица имеет вид:
(обратите внимание на сходство строк матрицы: 1 с 3 и 2 с 4). Определители: Δ1 = 5 > 0,
Δ4 = 1* Δ3 = 1*209 > 0. Поскольку все определители положительны, то АСР устойчива. ♦ 3.1.5 Критерий Михайлова. Описанные выше критерии устойчивости не работают, если передаточная функция системы имеет запаздывание, то есть может быть записана в виде
где t - запаздывание. В этом случае характеристическое выражение замкнутой системы полиномом не является и его корни определить невозможно. Для определения устойчивости в данном случае используются частотные критерии Михайлова и Найквиста. Порядок применения критерия Михайлова: 1) Записывается характеристическое выражение замкнутой системы: Dз(s) = A(s) + B(s).e-ts. 2) Подставляется s = jw: Dз(jw) =Re(w) + Im(w). 3) Записывается уравнение годографа Михайлова Dз(jw) и строится кривая на комплексной плоскости.
Если годограф Михайлова проходит через начало координат, то говорят, что система находится на границе устойчивости.
3.1.6 Критерий Найквиста. Данный критерий аналогичен критерию Михайлова, но работает с АФХ системы, поэтому более сложен для расчетов. Последовательность: 1)
Определяется передаточная функция разомкнутой системы 2) Определяется число правых корней m. 3) Подставляется s = jw: W¥(jw). 4) Строится АФХ разомкнутой системы. Для устойчивости АСР необходимо и достаточно, чтобы при увеличении w от 0 до ¥ АФХ W¥(jw) m раз охватывала точку (-1; 0), где m - число правых корней разомкнутой системы.
В случае, если характеристическое уравнение разомкнутой системы A(s) = 0 корней не имеет (т.е. m = 0), то критерий, согласно критерию, замкнутая система является устойчивой, если АФХ разомкнутой системы W¥(jw) не охватывала точку (-1; 0), в противном случае система будет неустойчива (или на границе устойчивости). 3.2. Показатели качества Если исследуемая АСР устойчива, то может возникнуть вопрос о том, насколько качественно происходит регулирование в этой системе и удовлетворяет ли оно технологическим требованиям. На практике качество регулирования может быть определено визуально по графику переходной кривой, однако, имеются точные методы, дающие конкретные числовые значения. Показатели качества разбиты на 4 группы: 1) прямые - определяемые непосредственно по кривой переходного процесса, 2) корневые - определяемые по корням характеристического полинома, 3) частотные - по частотным характеристикам, 4) интегральные - получаемые путем интегрирования функций. 3.2.1 Прямые показатели качества. К ним относятся: степень затухания y, перерегулирование s, статическая ошибка ест, время регулирования tp и др.
Предположим, переходная кривая, снятая на объекте, имеет колебательный вид (см. рис. 1.38). Сразу по ней определяется установившееся значение выходной величины ууст. Степень затухания y определяется по формуле
где А1 и А3 - соответственно 1-я и 3-я амплитуды переходной кривой. Перерегулирование s = Статическая ошибка ест = х - ууст, где х - входная величина. Время достижения первого максимума tм определяется по графику. Время регулирования tp определяется следующим образом: Находится допустимое отклонение D = 5% ууст и строится «трубка» толщиной 2D. Время tp соответствует последней точке пересечения y(t) с данной границей. То есть время, когда колебания регулируемой величины перестают превышать 5 % от установившегося значения. 3.2.2 Корневые показатели качества. К ним относятся: степень колебательности m, степень устойчивости h и др. Не требуют построения переходных кривых, поскольку определяются по корням характеристического полинома. Для этого корни полинома откладываются на комплексной плоскости и по ним определяются: Степень устойчивости h определяется как граница, правее которой корней нет, т.е. h = min где Re(si) - действительная часть корня si. Степень колебательности m рассчитывается через угол g: m = tg g. Для определения g проводятся два луча, которые ограничивают все корни на комплексной плоскости. g - угол между этими лучами и мнимой осью. Степень колебательности может быть определена также по формуле: m = min 3.2.3 Частотные показатели качества. Для определения частотных показателей качества требуется построение АФХ разомкнутой системы и АЧХ замкнутой системы. По АФХ определяются запасы: DA - по амплитуде, Dj - по фазе.
Для определения Dj строится окружность единичного радиуса с центром в начале координат. Запас Dj определяется по точке пересечения с этой окружностью. По АЧХ замкнутой системы определяются показатели колебательности по заданию М и ошибке МЕ как максимумы соответственно АЧХ по заданию и АЧХ по ошибке. 3.2.4 Связи между показателями качества. Описанные выше показатели качества связаны между собой определенными соотношениями:
4. Настройка регуляторов. 4.1. Типы регуляторов. Для регулирования объектами управления, как правило, используют типовые регуляторы, названия которых соответствуют названиям типовых звеньев: 1) П-регулятор (пропорциональный регулятор) WП(s) = K1. Принцип действия заключается в том, что он вырабатывает управляющее воздействие на объект пропорционально величине ошибки (чем больше ошибка е, тем больше управляющее воздействие u). 2) И-регулятор (интегрирующий регулятор) WИ(s) = Управляющее воздействие пропорционально интегралу от ошибки. 3) Д-регулятор (дифференцирующий регулятор) WД(s) = K2 s. Генерирует управляющее воздействие только при изменении регулируемой веричины: u = K2 На практике данные простейшие регуляторы комбинируются в регуляторы вида: 4) ПИ-регулятор (пропорционально-интегральный регулятор)
WПИ(s) = K1 +
5) ПД-регулятор (пропорционально-дифференциальный регулятор)
WПД(s) = K1 + K2 s.
6) ПИД-регулятор. WПИД(s) = K1 + Наиболее часто используется ПИД-регулятор, поскольку он сочетает в себе достоинства всех трех типовых регуляторов. 4.2. Определение оптимальных настроек регуляторов. Регулятор, включенный в АСР, может иметь несколько настроек, каждая из которых может изменяться в достаточно широких пределах. При этом при определенных значениях настроек система будет управлять объектом в соответствии с технологическими требованиями, при других может привести к неустойчивому состоянию. Поэтому стоит задача определить настройки, соответствующие устойчивой системе, но и выбрать из них оптимальные. Оптимальными настройками регулятора называются настройки, которые соответствуют минимуму (или максимуму) какого-либо показателя качества. Требования к показателям качества устанавливаются непосредственно, исходя из технологических. Чаще всего накладываются требования на время регулирования (минимум) и степень затухания (Y ³ Yзад). Однако, изменяя настройки таким образом, чтобы увеличить степень затухания, мы можем прийти к слишком большому времени регулирования, что нецелесообразно. И наоборот, стремясь уменьшить время регулирования, мы получаем более колебательные процессы с большим значением Y.
Поэтому для определения оптимальных настроек разработан ряд математических методов, среди которых метод D-разбиения. Кривой D-разбиения называется кривая в плоскости настроек регулятора, которая соответствует определенному значению какого-либо показателя качества. Например,
требуется обеспечить степень затухания Y ³ Yзад. Имеется формула, связывающая Y со степенью колебательности m: 1) Определяется ХПЗС Dз(s) с неизвестными настройками. 2) Делается подстановка s = jw - mw и разделение Dз(jw - mw) = Re(w) + Im(w). 3) Полученное выражение приравнивается к нулю и получается система
Im(w) = 0 Данная система имеет несколько неизвестных: w и настройки регулятора. 4) Далее, изменяя w от 0 до ¥ эта система решается относительно настроек регулятора. 5) По полученным данным строится кривая, по которой определяются оптимальные настройки.
Оптимальные настройки соответствуют максимальному значению K0 (для ПИ- и ПИД-регуляторов) или K1 (для ПД-регулятора). Часть 2. Средства автоматизации и управления. 1. Измерения технологических параметров. 1.1. Государственная система приборов (ГСП). ГСП объединяет в себе все средства контроля и регулирования технологических процессов. Характерной особенностью ГСП является: 1) блочно-модульный принцип, лежащий в основе конструкций устройств; 2) унификация входных-выходных сигналов и сигналов питания. Содержит три ветви: 1) гидравлическую, 2) пневматическую, 3) электрическую. Блочно-модульный принцип характеризуется наличием отдельных модулей или блоков, выполняющих достаточно простую функцию. Этот принцип позволяет уменьшить номенклатуру средств автоматизации, упрощает ремонт и замену, уменьшает стоимость, позволяет реализовать принцип взаимозаменяемости. Унифицированные сигналы: 1) Пневматические - сигналы давления сжатого воздуха диапазон
изменения сигнала: 0,2 - 1 сигнал
питания: 1,4 расстояние передачи сигнала: до 300 м. |
|
||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 =
=
 =
=  =
=
 Для
построения АЧХ и ФЧХ используются формулы:
Для
построения АЧХ и ФЧХ используются формулы: .
. Формула
для построения ЛАЧХ: L(w) = 20.lg Aвых(w).
Формула
для построения ЛАЧХ: L(w) = 20.lg Aвых(w).  ЛАЧХ ЛФЧХ
Пример цепи
ЛАЧХ ЛФЧХ
Пример цепи ЛАЧХ ЛФЧХ
Пример цепи
ЛАЧХ ЛФЧХ
Пример цепи
 Виды
корней характеристического уравнения:
Виды
корней характеристического уравнения: Wy -
передаточная функция объекта управления.
Wy -
передаточная функция объекта управления. .
. .
. .
. .
.
 ,
,
 ,
, Для
устойчивой АСР необходимо и достаточно, чтобы годограф Михайлова (см. рис.),
начинаясь при w = 0 на положительной вещественной полуоси, обходил
последовательно в положительном направлении (против часовой стрелки) при
возрастании w от 0 до ¥ n
квадрантов, где n - степень характеристического полинома.
Для
устойчивой АСР необходимо и достаточно, чтобы годограф Михайлова (см. рис.),
начинаясь при w = 0 на положительной вещественной полуоси, обходил
последовательно в положительном направлении (против часовой стрелки) при
возрастании w от 0 до ¥ n
квадрантов, где n - степень характеристического полинома. .
. Если
АФХ проходит через точку (-1; 0), то замкнутая система находится на границе
устойчивости.
Если
АФХ проходит через точку (-1; 0), то замкнутая система находится на границе
устойчивости.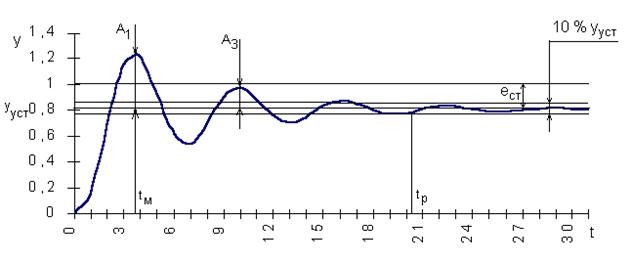
 ,
, ,
где ymax - максимум переходной кривой.
,
где ymax - максимум переходной кривой. .
. Запас
DA определяется по точке пересечения АФХ с отрицательной действительной
полуосью.
Запас
DA определяется по точке пересечения АФХ с отрицательной действительной
полуосью.
 Зависимость
Y от tp в общем случае имеет вид, изображенный на графике
(см. рис. 1.42).
Зависимость
Y от tp в общем случае имеет вид, изображенный на графике
(см. рис. 1.42). Например,
для ПИ-регулятора кривая D-разбиения может иметь вид представленный на рисунке
1.43.
Например,
для ПИ-регулятора кривая D-разбиения может иметь вид представленный на рисунке
1.43.
