|
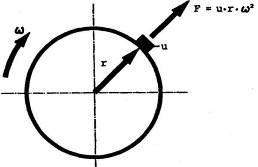
Дипломная работа: Измерение, контроль, диагноз и устранение колебаний ротационных машинДипломная работа: Измерение, контроль, диагноз и устранение колебаний ротационных машинВведение В данном дипломном проекте рассматривается возникновение паразитных колебаний в ротационных машинах их измерение отслеживание, а также методы их диагностики и устранения. У ротационных машин, как например, турбин, турбокомпрессоров, насосов, вентиляторов, электродвигателей и генераторов, механические колебания это нежелательное и мешающее явление. Колебания уменьшают эксплуатационную надежность и срок службы машин, так как они представляют собой дополнительную динамическую нагрузку. Они способствуют преждевременному износу подшипников и могут привести к деформации роторов, поломке материала и повреждению фундамента. паразитный колебание устранение диагностика 1. Колебания машин Колебания машин создаются преимущественно их вращающимися и осциллирующими частями. При этом, главным возбудителем колебаний является неуравновешенность роторов. Ротор,
имеющий дисбаланс создает во время вращения свободные центробежные силы,
зависимые от частоты вращения (рисунок 1.1). Их величина вычисляется на основе
следующего соотношения
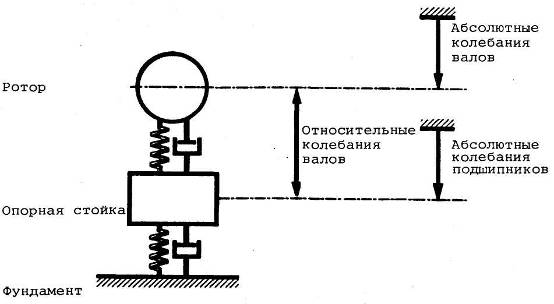
Рисунок 1.1 – Дисбаланс на вращающемся роторе Вызванные дисбалансом центробежные силы и действующие на ротор переменные силы (например, магнитные силы, гидравлические силы и т.п.) побуждают ротор и вал ротора к колебаниям. Через масляную пленку подшипников скольжения (или через подшипники качения) колебания и усилия передаются на опоры и на фундамент машины. Величина передаваемых колебаний зависит от ряда разных параметров. Самые существенные из них это: жесткость и демпфирование масляной пленки, опор и фундаментов, а также масса роторов, опор и фундаментов. Как видно на рисунке 1.2 и 1.3, различаем три вида колебаний: a) Относительные колебания валов – это быстрые движения вала ротора по отношению к вкладышу подшипника. b) Абсолютные колебания опор – под этим подразумеваются быстрые движения вкладыша подшипника и корпуса подшипника по отношению к жесткой опорной точке в пространстве. c) Абсолютные колебания валов – это быстрые движения вала ротора по отношению к жестко установленной опорной точке в пространстве.
Рисунок 1.2 – Виды колебаний у машин
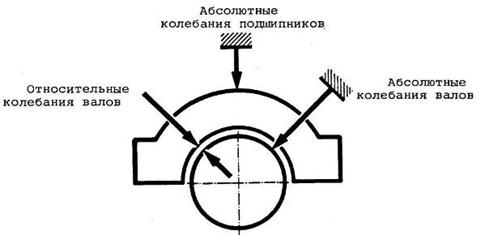
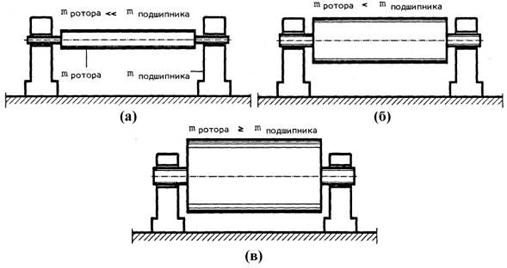
Рисунок 1.3 – Виды колебаний и места их измерения (на примере подшипника скольжения) В то время как раньше оценка плавности хода всех машин проводилась исключительно на основе колебаний подшипников, сегодня принимается во внимание конструкция данных машин, а при измерении предпочтение отдается тому виду колебаний, который имеет самую большую выразительность. Как правило, можно считать, что: a) у машин на подшипниках скольжения, как например, у турбин, компрессоров, передач и насосов, оценка плавности хода проводится на основе измерения относительных колебаний валов. b) у машин на подшипниках качения, как например, воздуходувок, центрифуг и мельниц оценка получаются вследствие измерения абсолютных колебаний подшипников. Кроме того, у машин на подшипниках скольжения следует дополнительно учесть соотношения масс и жесткости испытуемой машины: a) Ротор с малой массой сможет побудить жесткую опорную конструкцию с большой массой только к незначительным колебаниям подшипников. Такие особенности конструкции встречаются, например, у множества ротационных компрессоров. В их случае ротор в своих подшипниках скольжения осуществляет большие движения вала. Относительные колебания вала тогда на коэффициент 10 – 50 больше, чем абсолютные колебания подшипников. В этом случае как измеряемую величину следует выбрать исключительно относительные колебания валов. b) Если масса роторов увеличивается, а опорная конструкция остается неизменной, то изменяется соотношение между колебаниями валов и колебаниями подшипников. В случае турбоагрегата мощностью в 100 МВт относительные колебания валов, как правило, только на коэффициент 4 – 10 больше, чем абсолютные колебания подшипников. Также и в этом случае предпочтение отдается измерению относительных колебаний валов. В случае турбоагрегатов для электростанций принято, дополнительно к этому измерять еще абсолютные колебания подшипников, чтобы получить более обширное описание ходовых качеств машин. c) В случае очень больших машин, особенно элементов низкого давления паровых турбин мощностью от 600 МВт, масса ротора по сравнению с массой опорной конструкции дальше растет. Здесь абсолютные колебания валов могут достигнуть примерно таких же самых значений, как абсолютные колебания подшипников. Относительные колебания валов тогда очень малые. Поэтому в таких случаях рекомендуется измерять абсолютные колебания валов. Если при одинаковой опорной конструкции масса ротора увеличивается, то относительные колебания валов становятся меньше, а абсолютные колебания подшипников больше.
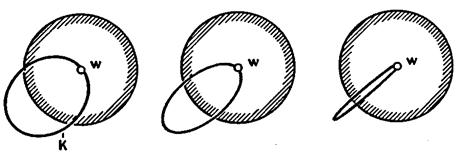
Рисунок 1.4 – Соотношение масс ротора и подшипника. 1.1 Измерение колебаний машин 1.1.1 Относительные колебания валов Ротор, имеющий дисбаланс приводит к колебаниям вала. Центр вала движется во время вращения по траектории, именуемой кинетической траекторией вала. В идеальных условиях, то есть, в случае изотропного вала и изотропных подшипников, кинетическая траектория, вызванная дисбалансом, составляет круг для каждого сечения ротора. Но обычно подшипники машин анизотропные, то есть, они имеют разную податливость в своих обоих главных направлениях жесткости. Поэтому их кинетическая траектория вала принимает характер эллипса, который, в крайнем случае, может приобрести форму прямой (Рисунок 1.5).
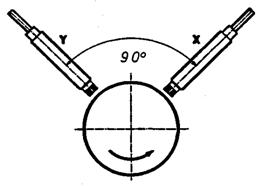
W – центр вала или центр вращения ротора К – кинетическая траектория вала Рисунок 1.5 – Вызванная дисбалансом кинетическая траектория вала с изотропными и анизотропными подшипниками Величина, форма и положение кинетической траектории вала изменяется в зависимости от числа оборотов. Обычно кинетические вылеты вала достигают максимума при критической скорости вращения. Кинетическая траектория вала содержит все информации о колебаниях вала ротора. Для полной регистрации кинетической траектории вала, то значит, движения вала в одной радиальной плоскости ротора, именно в этой плоскости следует закрепить два датчика, в двух перпендикулярных друг к другу направлениях (Рисунок 1.6). Для полного учета кинетической траектории вала, в радиальной плоскости следует установить два датчика под 90° один к другому.
Рисунок 1.6 – Расположение датчиков Каждый
датчик принимает измеряемые в его монтажном направлении вибросмещения вала
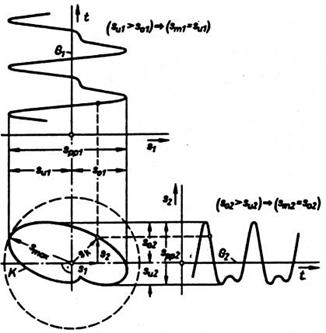
Примеры временной зависимости вибросмещений и соответствующих кинетических траекторий валов показаны на рисунке 1.7 и 1.8. В самом простом случае, при одной только частоте, кинетическая траектория вала эллипс (рисунок 1.8). Собранные вместе колебания приводят, в зависимости от свойственного им частотного спектра, к большему или меньшему искажению кинетической траектории вала (рисунок 1.7). Из
возможных величин измерения, как-то: висбросмещение, колебательная скорость и
ускорение, решающей величиной для колебаний вала выделено вибросмещение
(единица измерения: Вибросмещение определяют двумя характеристиками: a)
максимальная амплитуда b)
наибольший размах колебаний Причем для определения состояния, достаточно одной, только из этих двух величин. Измерение колебаний вала следует всегда проводить в зоне опоры.
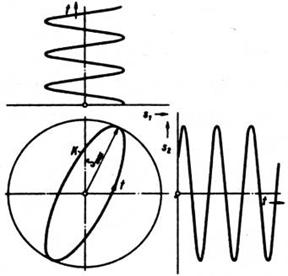
Рисунок 1.7 – Примеры временной зависимости вибросмещений и соответствующих кинетических траекторий валов все присутствующие колебания
Рисунок 1.8 – Примеры временной зависимости вибросмещений и соответствующих кинетических траекторий валов только при одной частоте Максимальная
амплитуда колебаний
За величину определения в Европе и, особенно в Германии предпочтительно принимается максимальная амплитуда. Это соответствует требованиям рекомендации 2059 VDI, которые обосновывают рекомендуемые предельные значения исключительно на максимальной амплитуде. Наибольший
размах колебаний
Размахом колебания обозначается здесь значение от пика до пика вибросмешения. В США и в промышленности предпочитают в качестве определяющей величины именно эту характеристику. Она согласна Стандарту API 670, однако, не соответствует VDI 2059, л. 1 по 5. Вообще же, нет возможного прямого сравнения между характеристикой «максимального размаха» и «наибольшей амплитуды колебаний». Если нельзя было обойти это сравнение, то его можно произвести при соблюдении следующего отношения:
В
зависимости от положения и вида кинетической траектории вала, при пересчете
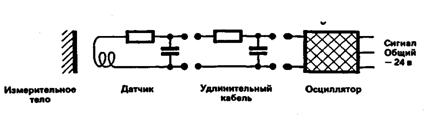
величин, следовательно, чтобы получить приблизительную максимальную амплитуду Вибродатчик колебаний вала – для измерения относительных колебаний вала употребляются, в настоящее время, без исключения, только бесконтактные датчики вибросмещения, работающие по принципу вихревых токов. Эти датчики охватывают все движения ротора в диапазоне частот от 0 до 10000 Гц. На конце каждого датчика встроена небольшая измерительная катушка, уложенная в особой эпоксидной смоле. Эта катушка, кабель датчика, удлинительный кабель и осциллятор составляют колебательный контур, питаемый несущей частотой в, приблизительно 1,2 МГц, (Рисунок 1.9).Измерительная схема по методу вихревых токов состоит из датчика, удлинительного кабеля и осциллятора Под влиянием несущей частоты, вокруг измерительной катушки образуется электромагнитное переменное поле. Если подвести к этому полю электропроводящее тело, то оно вносит затухание катушки, и это позволяет определить, на каком расстоянии от катушки находится тело.
Рисунок 1.9 – Измерительная схема На выходе осциллятора образуется постоянное напряжение и переменное напряжение с суперпозицией. Постоянное напряжение пропорционально среднему расстоянию между телом и катушкой, а переменное напряжение колебаниям тела. Эти напряжения могут быть замерены на приборах для измерения колебаний, учтены и контролированы. 1.1.2 Абсолютные колебания опор Колебания вала представляют непосредственную реакцию ротора на воздействующие на него переменные усилия. Через реагирующую, как пружина пленку масла подшипника скольжения или через тело качения подшипника качения, колебания вала передаются частично на опорную конструкцию, на картер машины и на её фундамент. Эти колебания представляют косвенную реакцию на усилия ротора. Они обозначаются, как «колебания опоры». Соотношение величин между колебаниями вала ротора и возникающими на поверхности машины колебаниями опор зависит от множества факторов влияния. Поэтому его заранее нельзя с уверенностью предопределить. Вообще же, как правило, на основании колебаний вала заключений по поводу колебаний опор, и наоборот, делать нельзя. При абсолютных колебаниях опор, рассматриваются колебания, возникающие на поверхности машины и, в особенности при колебаниях вблизи опор или на самих опорах. Эти колебания чаще всего замеряются без особых трудностей. Для мест измерения указаны кожухи опор, притом замерять следует в трех координатных направлениях (рисунок 1.10 и 1.11). Для машин с горизонтальной осью, это следующие направления: a) горизонтальное, b) вертикальное. c) осевое направление. Полученные
в этих местах измерения результаты учитываются раздельно и контролируются. Мы
здесь сознательно отказываемся от векторного сложения значений колебаний,
замеренных в координатных направлениях, (как практикуется при максимальной
амплитуде
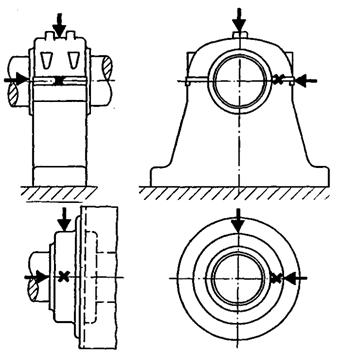
Рисунок 1.10 – Рекомендуемые точки замера на опорах крупных вращательных машин (взято из Стандарта ИСО 39 45)
Рисунок 1.11 – Рекомендуемые точки замера на электрических машинах (взято из Стандарта ИСО 2373) Из
возможных величин измерения, международно-распространенными и всеобще принятыми
Нормами и Рекомендациями, за решающую величину для абсолютных колебаний опор
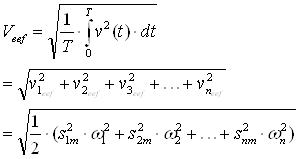
принято эффективное значение виброскорости: Эффективное значение виброскорости определяется следующим образом:
При сложении отдельных частичных частот колебаний, принимаются во внимание лишь те части колебаний, частота которых заключается в пределах от 10 до 1000 Гц. Наибольшее из замеренных, в предписанных местах измерения, и в заданном направлении измерения, эффективных значений частоты колебания машины, называется интенсивностью колебаний. Интенсивность колебаний это обширная и просто замеряемая характеристика, хорошо описывающая колебательное состояние машины приводящая к надежной оценке. Некоторые, ограничиваемые для специальных машин нормы, ряд национальных норм и рекомендаций и некоторые внутризаводские нормали уточняют следующие величины измерений для колебаний опор: a)
пиковое значение ускорения колебания b)
пиковое значение вибросмещения c)
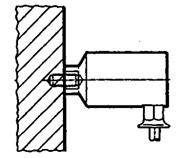
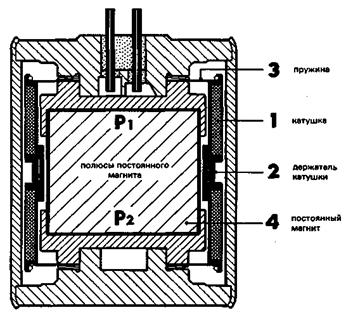
значение от пика до пика вибросмещения Эти единицы измерения не соответствуют международно признанным стандартам ИСО, нормам ДИН и рекомендациям VDI. Абсолютные колебания опор могут замеряться либо пьезоэлектрическими датчиками ускорения, либо электродинамическими датчиками частоты колебаний. В обоих случаях, для замера надо датчики держать у корпуса машины или привинтить их к нему (рисунок 1.12). Они действуют при контакте с машиной. Все измерительные приборы и контрольные установки главным образом оборудуются электродинамическими датчиками виброскорости. Схема конструкции датчика представлена на рисунке 1.13. В кольцевидном воздушном зазоре постоянного магнита (4) движется катушка (1), подвешенная на двух мембранных пружинах (2), позволяющих колебание. Катушка, собственной массой, массой опоры катушки (3) и, благодаря жесткости мембранной пружины образует сейсмическую массу. Если датчик приводится в колебательное движение, то магнит перемещается, затрагивая неподвижную катушку. Таким образом, катушка прерывает линии поля магнита, благодаря чему в ней индуцируется напряжение, пропорциональное частоте колебаний. Это напряжение может очень простым образом замеряться виброизмерительными приборами или контрольными установками, ими учитываться и контролироваться.
Рисунок 1.12 – Метод установки вибродатчика
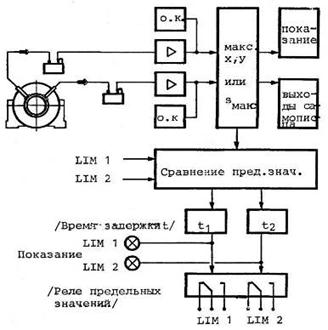
Рисунок 1.13 – Конструкция электродинамического датчика виброскорости 1.2 Контроль колебаний машин В большинстве случаев определение состояния колебаний важных для производства и капиталоемких машин, машин с дистанционным управлением и машин с «тенденцией к колебаниям» с помощью переносных измерительных приборов недостаточно. В данном случае, для определения и сообщения каждой неполадки – а прежде всего, внезапно изменяющихся колебаний – требуются виброконтрольные установки, работающие в режиме непрерывного измерения. Задача виброконтрольных установок состоит в надежной защите машин от повреждений вследствие колебаний. Для выполнения своей задачи, виброконтрольные установки с высокой надежностью должны обеспечивать данные операции: a) Непрерывное измерение колебаний машин b) Автоматическое сравнение измеряемых значений с заранее устанавливаемыми предельными значениями c) Корректировка системой управления (В диапазоне предельных значений) d) Срабатывание реле при превышении предельных значений для отключения машины Виброконтрольные установки (рисунок 1.14) должны сигнализировать каждое нарушение предельных значений, которое приводит к превышению заранее установленной задержки срабатывания. Такую же важную роль играет исключение ложных сигнализаций, вызываемых помехами в системе контрольной электроники или в блоке питания. Современные контрольные установки оснащены многочисленными схемами – от схем шунтирования при отказе сети до «схем ОК» измерительных цепей датчиков, которые защищают от ложных сигнализаций. Благодаря этому, до значительной степени исключаются ложные сигнализаций, которые могут приводить к ненужным отключениям машин и потерям в производстве. Для контроля действуют те же самые принципы как для измерения колебаний машин. Датчики, точки измерения и измеряемые величины идентичны. Предельные значения для предупреждения и отключения a) определяются изготовителем машин, или b) выводятся из нормального эксплуатационного состояния машины, или c) берутся из указанных стандартов и директив. У вентилятора (рисунок 1.15), опирающегося на подшипники качения, контролируются абсолютные колебания обоих подшипников. Обычно достаточно монтировать датчик виброскорости только в направлении максимального размаха колебаний, т.е., в большинстве случаев в горизонтальном направлении.
Рисунок 1.14 – Принципиальная схема прибора для контроля относительных колебаний валов в подшипнике скольжения
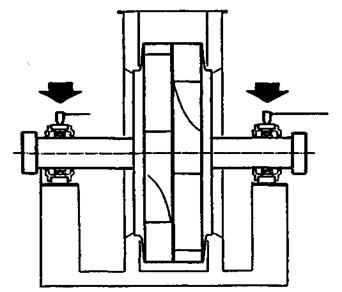
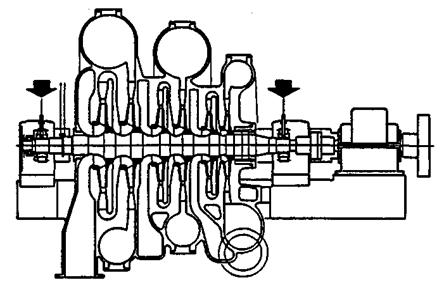
Рисунок 1.15 – Монтирование датчика к вентилятору У турбокомпрессоров (рисунок 1.16) в подшипниках скольжения контролируются относительные колебания валов. Для этого, в каждый подшипник ввинчены два бесконтактных датчика перемещения, которые на 90° смещены друг относительно друга.
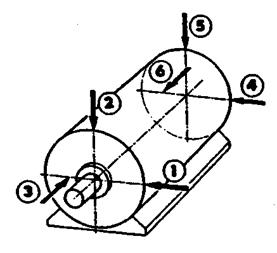
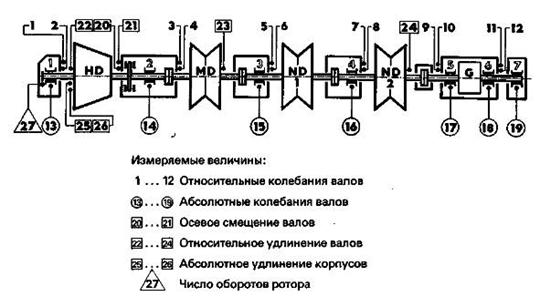
Рисунок 1.16 – Монтирование датчика к турбокомпрессору В случае необходимости контроля колебаний отдельных машин в немногих точках измерения, как, например, вентиляторов, центрифуг и малогабаритных турбин, самое рентабельное решение предоставляют одно или двухканальные виброконтрольные приборы. Данные приборы жесткой конструкции включают в себя всю систему контрольной электроники с измерительным усилителем, реле предельных значений и блоком питания напряжением. Большие машинные агрегаты, как турбоагрегаты на электростанциях и турбокомпрессоры требуют контроля колебаний на многочисленных опорных точках (Рисунок 1.7). Кроме колебаний, часто и следует проводить контроль других, важных для эксплуатации машины, измеряемых величин, как например: a) относительных колебаний валов b) абсолютных колебаний подшипников c) осевых и радиальных смешений валов d) эксцентриситета вала ротора e) относительного удлинения вала f) абсолютного расширения кожуха g) числа оборотов h) температуры i) положения клапана
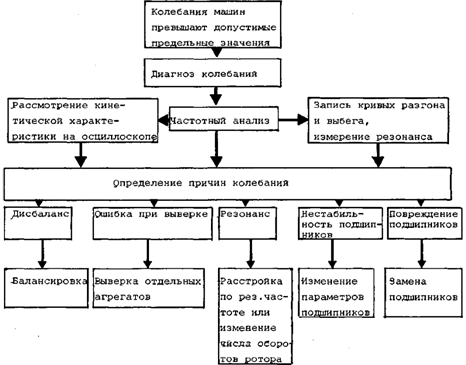
Рисунок 1.17 – Измеряемые величины и точки измерений для контроля парового турбоагрегата в 450 МВт Решению таких задач способствует применение модульных контрольных установок, которые можно собирать из любых модулей в любом объеме, приспосабливать к каждой измеряемой величине и оснащать требуемыми для конкретной машины элементами 1.3 Диагноз колебаний машин Если колебания машины превышают допустимые предельные значения, необходимо выяснить причины такого явления. Только если причины и возбудители колебаний известны, возможно, систематическое подавление этих колебаний. Операции измерения и контроля дают возможность количественного описания вибрационной характеристики (рисунок 1.18). Качественное описание состава или причин и возбудителей колебаний машин возможно только после проведения диагноза колебаний, причем частотный анализ играет главную роль.
Рисунок 1.18 – Мероприятия для диагноза колебаний и систематического подавления колебаний машин Частотный анализ – при частотном анализе смесь колебаний машин определяется с помощью вибродатчиков и путем измерительной техники разлагается на гармонические составляющие. Иными словами: Осуществляется анализ Фурье, результатом которого является определение всех возникающих частот колебаний с соответствующими амплитудами. На рисунке 1.19 показан типичный пример механических колебаний электродвигателя. В верхней диаграмме показана вся смесь возникающих на поверхности машины колебаний в зависимости от времени. С помощью частотного анализа обнаруживается, что данная смесь колебаний состоит из трех дискретных колебаний. Первая составляющая смеси колебаний встречается с частотой в 25 Гц, что соответствует частоте вращения электродвигателя. Следовательно, причиной возникновения этой составляющей колебаний является дисбаланс электроякоря. Вторая составляющая колебаний встречается с частотой в 4 Гц. Причиной возникновения этой составляющей является приводимый ременным шкивом ремень, который в данном случае вращается с частотой в 4 Гц. Третья составляющая колебаний имеет частоту в 100 Гц и является типичной для машин переменного напряжения. Во время каждого периода сетевого напряжения магнитное поле электрической машины дважды перемагничивается, вследствие чего в статоре возникают переменные силы с двойной сетевой частотой, которые в свою очередь возбуждают листовые элементы статора к колебаниям с частотой f = 100 Гц. |
|
|||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||