|
Дипломная работа: Измерение, контроль, диагноз и устранение колебаний ротационных машинНа машинах с осциллирующими массами кроме колебаний с частотой вращения возникают и колебания старшего порядка. Путем балансировки можно только оптимизировать, а не устранять колебания с частотой вращения. На колебания старшего порядка изменения конструкций не повлияют. В заключение следует, и упоминать соседние машины, которые также могут причинять колебания. Под этим необходимо понимать машины, стоящие на совместном фундаменте и передающие колебания через этот фундамент. Если эти колебания мешают, обязательно необходимо устранять колебания каждой отдельной машины или устанавливать машины на виброизолированные фундаменты. Перечисленные выше причины возникновения колебаний представляют только часть многочисленных возможных причин. Несмотря на это, однако, учитывая таблицы 1.1 и 1.2 на практике можно интерпретировать уже больше 90% всех колебаний машин. В некоторых случаях рекомендуется дополнить частотный анализ измерением характеристики разгона и выбега машины и рассмотрением кинетической характеристики. В сложных случаях диагноз машины улучшается путем проведения измерений. 1.4 Устранение колебаний В перечне причин колебаний было упомянуто, что дисбаланс является самым частым вибровозбудителем в области машиностроения. Этим затронута одна из повседневных проблем современного машиностроения, решение которой здесь рассматривается в основных чертах, т.е., речь идет о балансировке роторов. Согласно определению под балансировкой следует понимать процесс, с помощью которого проверяется распределение масс ротора и, в случае необходимости, проводится соответствующая коррекция. Благодаря этому обеспечивается, что колебания опорных шеек с частотой вращения при эксплуатационных оборотах находятся в определенных пределах. Многочисленность конструкций роторов обусловливает также многочисленность методов балансировки. Поэтому, рассматриваем теперь главные методы балансировки с теоретической стороны. Представим
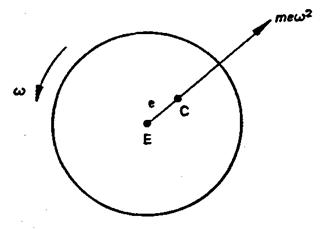
себе тонкую шайбу (рисунок 1.21), которая вырезана из ротора вертикально к оси.
Представим себе дальше, что при невращающемся роторе ось стержня проходит через
геометрическую середину Данная сила находится под прямым углом к оси стержня.
Рисунок 1.21 – Ротор в виде шайбы Балансировка такой шайбы проста, так как ротор имеет только одну радиальную плоскость. Следовательно, может образоваться только статический дисбаланс, который можно устранять или, по меньшей мере, уменьшать до допустимого значения с помощью, так называемого метода балансировки в одной плоскости путем добавления или устранения массы ротора. На практике, в большинстве случаев встречаются роторы с большей осевой протяженностью, как например, цилиндрические роторы, которые можно представлять себе в виде многих отдельных тонких шайб, находящихся в вертикальном относительно оси стержня положении. Для каждой шайбы можно определять дисбаланс, который показывает состояние неуравновешенности данной шайбы. По правилам статистики отдельные дисбалансы всех шайб в конечных плоскостях ротора можно объединять и образовать равнодействующую дисбаланса. Отдельные
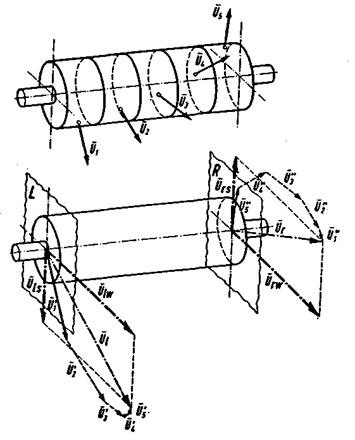
дисбалансы (рисунок 1.22)
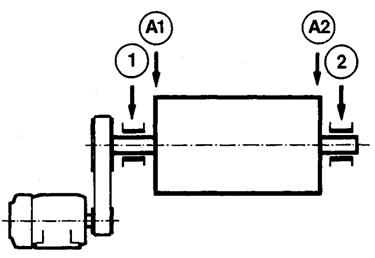
Рисунок 1.22. Дисбалансы цилиндрического ротора Этим уже описан основной принцип применяемого в настоящее время в большинстве случаев метода балансировки, т.е., метода балансировки в двух плоскостях. В данном случае дисбаланс в двух радиальных плоскостях ротора устраняется путем добавления или снятия массы, причем этот метод обеспечивает компенсацию и динамической и статической составляющих дисбаланса ротора. К сожалению, однако, этот столь важный на практике метод применим только со следующим ограничением: Хороших результатов с методом балансировки в двух плоскостях можно достигать только с жестким балансируемым ротором. Ротор считается жестким, если его состояние неуравновешенности до достижения эксплуатационной скорости не заметно или изменяется только незначительно. Это значит, что дисбаланс ротора представляет фиксированную величину, которая не связана с определенным числом оборотов, и которую можно устранять при любой скорости в пределах рабочего числа оборотов. К счастью всем, которым приходится заниматься балансировкой, большинство роторов отвечает этому требованию. Для балансировки жестких роторов можно пользоваться двумя, отвечающими условиям на практике методами: a) Балансировка на балансировочном станке b) Балансировка (эксплуатационная балансировка) на месте, причем балансируемая деталь монтирована. Области применения этих двух методов специфически. Балансировочный станок в представленном на рисунке виде дает технически и экономно правильное решение задач балансировки в производстве. Его габариты, вес и приводная мощность должны отвечать требованиям балансировки определенного ротора. Важно и указать факт, что всегда необходимо приводить ротор к балансировочному станку, и что как правило, можно отбалансировать только отдельный ротор и не комплектную машину. Операция балансировки на балансировочном станке проста, быстра и надежна. Второй метод называется методом балансировки на месте. В данном случае встроенный ротор отбалансируется как часть комплектной машины, т.е., крыльчатка балансируется непосредственно на вентиляторе для отходящих газов, центрифуга – в центрифуге и шлифовальный круг – на шлифовальном станке. При этом нет необходимости приобретения балансировочного станка, демонтажа и транспортирования ротора. Используемый для балансировки на месте метод в данном случае рассматривается на примере центрифуги. На рисунке 1.23 и 1.24 показана принципиальная конструкция центрифуги. Здесь речь идет о длинном и жестком роторе, дисбаланс которого следует устранять динамически в двух плоскостях. Точки измерения = две опорные точки 1 и 2. Устранение дисбаланса осуществляется в конечных плоскостях А1 и А2 ротора путем добавления или снятия массы.
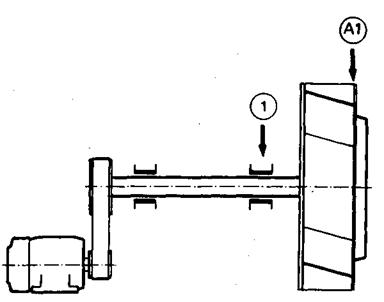
Рисунок 1.23 – Схема конструкции центрифуги Для определения уравновешивающих масс на обеих опорных точках 1 и 2 измеряются колебания с частотой вращения барабана центрифуги. Колебания воздуходувки вследствие дисбаланса измеряются на опорной точке 1 и дисбаланс устраняется в плоскости центра тяжести А1.
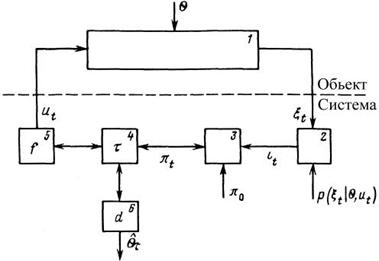
Рисунок 1.24 – Схема конструкции воздуходувки Для балансировки в одной плоскости в целом требуются три измерительных действия: Действие 1- с помощью балансировочного прибора измеряются величина и угловое положение колебаний (возникающих вследствие дисбаланса) при рабочей скорости на опорной точке 1 («начальный дисбаланс»). Действие 2 – в плоскость коррекции А1 ротора устанавливается дисбаланс известной величины («тарировочная масса»). Повторяется измерение величины и углового положения колебаний на опорной точке 1. Определяется и устанавливаются коррекционные массы для ротора. Действие 3 – производится проверка правильности балансировки. Для этого измерять колебания на опорной точке и сравнивать получаемые значения со значениями допусков. Балансировка упругих роторов – Кроме рассматриваемых в предыдущей части жестких роторов нам известны и упругие роторы. Упругими называются все роторы, которые являются нежесткими, т.е. состояние дисбаланса которых изменяется в зависимости от числа оборотов. Среди упругих роторов первостепенная важность придается гибким роторам, так как они часто встречаются в высококачественных роторных системах. Например, турбины, турбогенераторы, турбокомпрессоры и турбонагнетатели обычно являются гибкими. 2. Обучение системы диагностики 2.1 Рассмотрение структуры методов и принципов построения и обучения системы диагностики В основном построение систем диагностики основывается на статистических методах. Под статистическими методами диагностики здесь и ниже имеются в виду методы, позволяющие организовать стохастически оптимальное управление диагностикой. Статистические методы диагностики уже достаточно четко проявили свои достоинства, как в теоретическом, так и в прикладном аспектах. Опишем сущность стохастической диагностики. На рисунке 2.1 дана структурная схема системы диагностики поясним ее составляющие: 1 – объект
диагностики. Он находится в таком состоянии 2 – блок
вычисления функции правдоподобия 3 – блок вычисления апостериорной вероятности
Здесь 4 – блок определения целесообразности остановки диагностического процесса или его продолжения; 5 – блок выбора следующей проверки объекта; работает, если в блоке 4 принято решение не останавливать диагностику; 6 – блок
выработки оценки
Рисунок 2.1 – Структурная схема системы диагностики, реализующей управляемый случайный диагностический процесс Таким
образом, видно, что диагностический процесс, в статистической диагностике
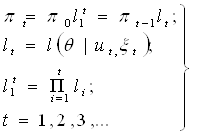
трактуется как управляемый случайный процесс с дискретным временем Таким
образом, общая стратегия диагностики
Практика использования статистической диагностики в технике привела к одному общему выводу – ее эффективность прямо пропорциональна знанию указанных функций распределения вероятностей тех случайных величин, которые и делают диагностический процесс случайным (распределение неисправностей, результатов проверок и т.д.). Это привело к постановке задач об адаптации системы диагностики к реальной статистической структуре диагностических данных. Однако большого развития эти работы не получили из-за того, что в конце 60-х годов системы диагностики, как правило, не имели в своем составе ЭВМ, что препятствовало автоматическому накоплению и обработке диагностической информации за достаточно большое число диагностик. Выше эта задача была упомянута как задача обучения системы диагностики. Речь идет о параметрической оценке тех функций распределения, которые определяют статистическую структуру контролируемых величин объекта (результатов проверок). Естественно, что сам процесс обучения системы диагностики должен каким-то образом оптимизироваться. Действительно, если обучение слишком затянется, то перейти на статистическую диагностику можно будет, лишь в конце жизненного цикла объекта. Ясно, что в этом случае получаемая выгода будет маленькой. Вместе с тем, если переход на статистические методы будет преждевременным, это также не даст большого выигрыша, а иногда может привести к излишним потерям. Действительно, ведь обучение системы диагностики – это оценка распределения истории диагноза. Если обучающая выборка слишком мала, то и достоверность оценки распределения будет недостаточной. Поэтому и статистическая оптимизация процесса диагностики по такой оценке не будет эффективной. Выше уже говорилось о том, что оценка распределения включает оценку его вида и оценку соответствующих параметров. Первая задача решается методами непараметрической статистики. Вторая использует, если говорить обобщенно, в основном две разновидности методов – байесовские и небайесовские. Учитывая опыт эксплуатации однотипных объектов, можно составить определенное мнение о семействах тех распределений, которые встречаются в задачах их диагностики. Как правило, это мультиномиальные и экспоненциальные семейства. Тем не менее, конкретное значение их параметров для объекта конкретного типа остается зачастую неизвестным. Именно поэтому задача оценки неизвестного распределения истории диагноза, в первую очередь, является задачей оценки параметров этого распределения. Также будет приводится обобщение некоторых видов непрерывных распределений, что дает возможность решать параметрическими методами и ряд непараметрических задач. До тех
пор, пока не получена оценка Будем использовать критерий оптимизации, который максимизирует ожидаемую сумму траекторных потерь и терминального выигрыша. Безусловно, что эквивалентным является и такой подход, когда минимизируется ожидаемая сумма траекторных и терминальных потерь. Траекторные
потери на обучение определяются, в основном, отсутствием статистической
оптимизации диагностики до того, как получена оценка Подобная нормировка составляющих важна уже на этапе решения частных задач обучения. А оптимизации самого процесса обучения выливается в принятие двух решений: a) об остановке процесса обучения; b)
о выработке оценки 2.2 Определение оптимального момента перехода на статистические методы диагностики Укажем только, что можно выделить два подхода к оценке параметров распределения – байесовский и небайесовский. Небайесовский
подход можно назвать в какой-то мере классическим, ибо до недавнего времени
именно он имел большое распространение. Чтобы проиллюстрировать его, положим,
что наблюдаемая контрольная величина имеет распределение с плотностью Как
правило, качество подобного рода классических оценок гарантируется лишь
асимптотически при выборках большого объема. В случае же малых выборок
приложение результатов асимптотической теории представляется недостаточно
обоснованным. А при обучении системы диагностики желательно в среднем обойтись
именно малыми выборками. К тому же, классический подход практически не
использует ту априорную информацию о возможных зданиях Преимущества, которые дает байесовский подход к решению задачи обучения системы диагностики. a) Байесовский подход может применяться к любым вариантам и частным случаям задачи обучения. b) При нем не возникает сложного вопроса о выборе необходимых оценок неизвестного параметра и доверительных интервалов, как в классической выборочной теории. c) Он позволяет довольно просто использовать последовательный анализ результатов обучения, что в классическом подходе очень сложно, а зачастую невозможно. d) Если практическая проверка применяемой байесовской модели процесса обучения покажет ее некоторую неадекватность, то она легко может быть изменена так, чтобы устранить указанное несоответствие. Причем изменения делаются в рамках самого байесовского подхода. e) При байесовском подходе могут быть выделены так называемые обновляющие процессы, по изменению характеристик которых можно очень оперативно в ходе самого обучения проверить степень адекватности выбранной вероятностной модели к действительности. В математической статистике подобная процедура носит название анализ остатков (residuals). f) В случае если априорной информации очень мало, априорное распределение неизвестного параметра все равно может достаточно обоснованно быть выбранным в классе так называемых неинформативных априорных распределений. g) Если же априорной информации достаточно для формирования априорного распределения, то выбор его в соответствующем классе сопряженных распределений очень упрощает все необходимые вычисления и снижает саму размерность задачи. 2.3 Общее решение задачи определения оптимального момента перехода на статистическую диагностику Обратная
индукция – чтобы приблизить
задачу к практике, напомним, что Обозначим
Считаем, что Для решения задачи вычисления
Заметим, что
Эти рассуждения мотивируют следующую теорему динамического программирования, которая формализует принцип обратной индукции. Пусть
Пусть для каждого
Тогда
следовательно,
Чтобы определить оптимальный момент Монотонный
случай – Выше рассматривался
случай Пусть дана интегрируемая
последовательность Если
на множестве
на множестве Справедливо также следующее
обращение этого утверждения: если Если
то
то выполняется (2.3) Другими словами, если момент sостанавливает
субмартингал, то остановленный субмартингал остается субмартингалом. Это вполне
естественно, поскольку в момент перехода на статистические методы последнее
значение Если
то справедливо (2.4). Другими словами, если s останавливает
обучение, когда уже появилась супермартингальность, то любое запаздывание
(остановка по Существует один случай, в
котором есть естественный претендент на оптимальный момент остановки. Это так
называемый монотонный случай, в котором стохастическая последовательность
т.е. множество В этом случае момент остановки
заслуживает специального
рассмотрения с точки зрения оптимальности. В дополнительной литературе
приводятся примеры, которые показывают, что момент остановки (2.7) не всегда
оптимален. Но эти примеры слишком конструктивны и практически не встречаются в
диагностической практике. К тому же можно выдвинуть ряд ограничений, которые
вполне выполнимы на практике, и внутри этих ограничений МО (2.7) оптимален. Эти
ограничения формируются следующим образом. Предположим, что в монотонном случае
момент Таким образом, на практике, если имеет место монотонный случай, то момент из (2.7) является оптимальным моментом перехода на статистические методы диагностики. Остается оценить, как часто практические задачи обучения системы диагностики являются монотонными. Если это случается всегда, то (2.7) даст полное решение всей задачи. Причем это решение легче реализовать в многомерном случае, чем обратную индукцию. 2.4 Обучение системы диагностики непараметрический общий случай Обучение системы диагностики в общем случае должно строиться по схеме на рисунок 2.2, где 1 – блок
выработки очередной гипотезы о виде распределения наблюдения (измеряемой
контрольной величины) 2 – блок оптимальной оценки параметров; 3 – блок
проверки гипотезы о виде распределения
Рисунок 2.2 – Схема обучения системы диагностики в общем случае Общая
идея работы блока 3 заключается в следующем. Очевидно, если первая гипотеза
блока 1 отвергнута блоком 3, то при оценке параметров следующей гипотезы в
блоке 2 может использоваться уже накопленная история Будем
разбирать случай, когда в блоке 3 проверяется гипотеза Необходимо
дать основные рекомендации по выбору
называемым мощностью стратегии непараметрического обучения (оценки функции распределения). Естественно, что две стратегии непараметрической оценки функции распределения эквивалентны, если у них одинаковая функция мощности. Неправильное непараметрическое решение о функции распределения может быть принято только двумя способами: a)
можно выбрать b)
принять Уровнем
значимости стратегии Стратегия
Использование сопряженных распределений. Сначала уточним еще раз понятие статистической структуры измерений. Выяснено, что и задачу непараметрической оценки в большом числе случаев можно свести к параметрической оценке путем использования обобщенных распределений, то необходимо более четко описать именно параметризованную статистическую структуру наблюдений. Последней будем называть
Напомним,
что Структура
(2.8) написана для случая одной диагностики. Она отражает тот факт, что
значение конкретной вероятности
Это параметризованная структура повторной выборки. Покажем
теперь связь с этой структурой апостериорной вероятности Теорема
(Неймана) о факторизации говорит, что если имеет место структура наблюдений
(2.9), то статистика
Выше в
Рисунок 2.3 – Структура для случая одной диагностики Заметим еще, что Нейман предполагал также существование плотности по
некоторой
мере
В
(2.10) показана лишь априорная вероятность Статистика
т.е.
если Действительно,
если
то
Сравнение с (2.10) показывает, что
Здесь
через Заключение В данной работе, были рассмотрены существующие ротационные системы, был проведён их анализ. Освещены принципы возникновения паразитных колебаний приводящих к поломке или разрушению механизмов. Изучены методы их измерения и контроля. Был проведён анализ принципов и методов разработки и реализации методов и средств обработки информации поступающей с дигнастируемой системы. Были рассмотрены различные методы и алгоритмы обработки данных, в том числе метод статистического обучения системы диагностики. Проведено исследование структурной схемы обучаемой системы диагностики, отображающей взаимодействие двух пространств. Проведенные в данной работе исследования показали, что для повышения эффективности, надёжности и экономичности работы элементов системы автоматизированного управления решать поставленную задачу практичнее всего на основе различных методов и средств обработки информации. Используя при этом методы статистического обучения системы диагностики |
|||||||||||||||||||
 |
||
| НОВОСТИ |  |
|
|
||
| ВХОД | |
|
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 (2.5)
(2.5) (2.3.6)
(2.3.6)