|
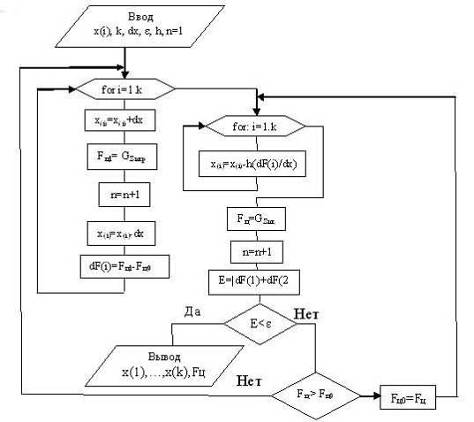
Дипломная работа: Технология обжига цинковых концентратов в печи кипящего слояПрограмма реализации алгоритма метода наискорейшего спуска: function f=mns (x1,.,xk,k,dx,e,h,n=1) n=1; x (1) =x1. x (k) =xk; Fц0= GZnкр; flag1=1; while flag1==1 for i=1: 2 x (i) =x (i) +dx; Fц1= GZnкр; n=n+1; x (i) =x (i) - dx; dF (i) =F1-F0; end flag2=1; while flag2==1 for i=1: 2 x (i) =x (i) - h* (dF (i) /dx); end Fц=GZnкр; n=n+1; E=abs (dF (1) +dF (2)); if E>e if Fц>Fц0 F=F0; flag2=1; else flag2=0; flag1=1; end flag1=0; end end Otvx1=x (1) Otvxk=x (k) OtvF= Fц end
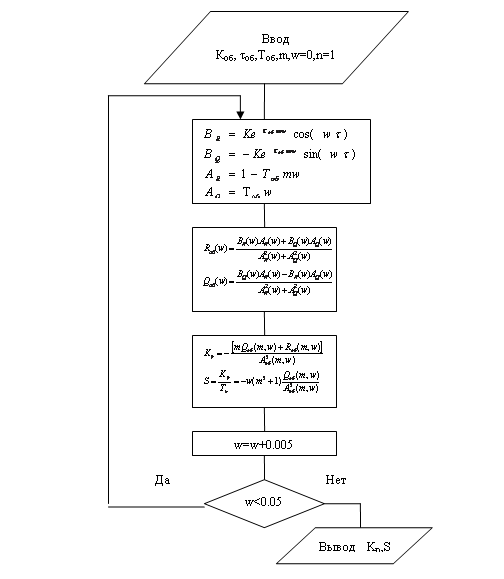
Рис.15. Блок-схема алгоритма поиска методом наискорейшего спуска Алгоритм расчета параметров настройки регулятора Алгоритм включает следующие предписания (рис.16): - вводятся значения Коб, τоб, Тоб,m,w=0; - вычисляются значения вещественного и мнимого составляющего числителя и знаменателя передаточной функций объекта регулирования BR, BQ, AR, AQ; - вычисляются значения вещественной и мнимой части АФХ объекта Rоб, Qоб; - вычисляются значения настроечных параметров регулятора Кр, S и выводятся результаты; - дается приращение значению частоты w=w+0.005; - вычисления производятся для каждого нового значения частоты пока оно не равно 0,05; - выводятся результаты вычислений Кр, S, w. По значениям Кр и S для каждого w [0: 0.05,0.005] строятся
линии равные степени затухания m=0, m=0.366
(см раздел по разработке системы стабилизации рисунок 8) и выбирается точка, соответствующая
оптимальным значениям Программа реализации данной блок-схемы на Matlab: function S_K (k,t,m,T,w) n=1; while w<0.05 Br=k*exp (t*m*w) *cos (t*w); Bq=-k*exp (t*m*w) *sin (t*w); Ar=1-T*m*w; Aq=T*w; R= (Br*Ar+Bq*Aq) / (Ar^2+Aq^2); Q= (Bq*Ar-Br*Aq) / (Ar^2+Aq^2); K=- (m*Q+R) / (R^2+Q^2); S=-w* (m^2+1) *Q/ (R^2+Q^2); masK=K; masS=S; w=w+0.005; n=n+1; K S hold on plot (masK,masS) w end Kp=K Sp=S
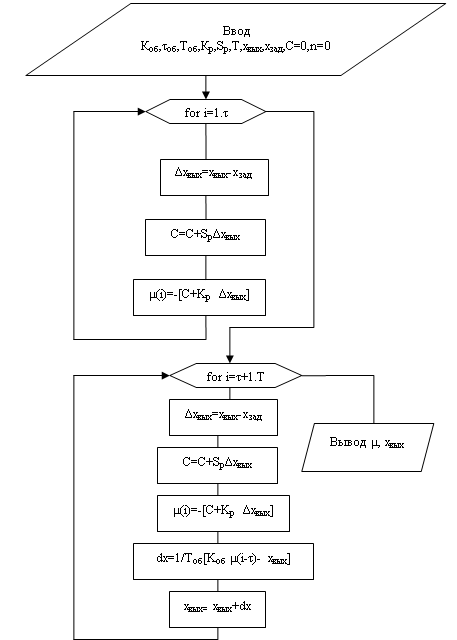
Рис.16. Блок схема алгоритма нахождения значений настроек регулятора Алгоритм расчета переходного процесса Алгоритм включает следующие предписания (рис.17): - вводятся значения Коб,τоб, Тоб, Кр,Sр, Т, хвых, хзад, С=0,n=0; - вычисляется значение отклонения регулируемой величины Δхвых; - значение управляющего воздействия μ за время запаздывания τ объекта; - вычисляются значения управляющего воздействия μ и выходной переменной объекта хвых на каждом моменте времени до времени Т, пока установится процесс, т.е. значение выходной переменной не станет приблизительно равной значению хзад. По результатам вычислений строится переходная характеристика процесса (см раздел по разработке системы стабилизации рис.9). Программа реализации данного алгоритма на Matlab: function per_pro (y,yz,T,dt,r) a= [1: p]; k=2.5; K=0.68; S=0.016; T=60; t=26; C=0; i=1; while i<=t n=0; dy=y-yz; while n<r C=C+S*dy*dt; n=n+1; end m (i) =- (C+K*dy); y1 (i) =y i=i+1; end for i=t+1: p n=0; dy=y-yz; while n<r C=C+S*dy*dt; n=n+1; end m (i) =- (C+K*dy); n=0; while n<r Dy=1/T* (k*m (i-t) - y) *dt; y=y+Dy; n=n+1; end y1 (i) =y i=i+1; m; y1; end plot (a,y1) end
Техническое обеспечение должно полностью удовлетворять требованиям, обеспечивающим достижения тех целей управления, которые были сформулированы в п. п.2.4, 2.5 и 2.6, а также общепринятым в цветной металлургии требованиям, которые были сформулированы в п. п.2.7.1, 2.7.2 и 2.7.3. В связи с тем, что структура системы управления (рис.4) предусматривает решение задач верхнего (задачи оптимизации и интеллектуальная подсистема) уровня, а также включает задачи нижнего уровня (стабилизация температуры в слое, расходов материалов, давлений и т.д.) в составе технического обеспечения АСУТП используется два управляющих компьютера. Для обеспечения решения задач планирования работы цеха, программ организационной подсистемы, а также подсистем оптимального управления и интеллектуальной подсистемы применяется управляющая вычислительная машина - УВМ. Для решения задач оперативного управления нижнего уровня нами предполагается использование управляющего контроллера. В автоматизированной системе управления нижнего уровня в качестве технической базы управляющей части системы автоматизации выбран программируемый логический контроллер Simatic S7-300 с центральным процессором CPU 315-2DP. Контроллер полностью отвечает требованиям концепции “Totally Integrated Automation”. Модульный программируемый контроллер Simatic S7-300 предназначен для решения задач автоматического управления низкой и средней степени сложности. Simatic S7-300 выбран по следующим причинам: · Широкий спектр модулей для максимальной адаптации к решению любой задачи. · Возможность использования распределенных структур ввода-вывода и простое включение в различные типы промышленных сетей. · Удобная для обслуживания конструкция и работа с естественным охлаждением. · Свободное наращивание возможностей при модернизации системы. · Высокая мощность, благодаря большому количеству встроенных функций. · Конфигурирование и программирование средствами STEP 7. · Возможность включения в сети MPI и SIMATIC NET. · Каждый центральный процессор S7-300 оснащен встроенным блоком питания с входным напряжением =24В. Кроме того, в составе S7-300 могут использоваться модули систем взвешивания и дозирования семейства SIWAREX. Эффективному применению контроллеров способствует возможность использования нескольких типов центральных процессоров различной производительности, наличие широкой гаммы модулей ввода-вывода дискретных и аналоговых сигналов, функциональных модулей и коммуникационных процессоров. В 2002 году началась смена поколений центральных процессоров программируемых контроллеров SIMATIC S7-300. CPU 315-2DP компактный центральный процессор нового поколения с встроенным интерфейсом ведущего/ведомого устройства PROFIBUS-DP. Основные характеристики SIMATIC S7-300 CPU 313C-2DP: Объем рабочей памяти (RAM) 128 Кбайт Объем загружаемой памяти (микрокарта памяти) 64 Кбайт …8 Мбайт Время выполнения: · логических операций 0.1 мкс · операций со словами 0.2 мкс · арифметических операций с фиксированной точкой 2.0 мкс · арифметических операций с плавающей точкой 6.0 мкс Количество флагов 2048 байт Количество счетчиков 256 Количество таймеров 256 Встроенные интерфейсы: MPI, PROFIBUS-DP Максимальное количество каналов ввода-вывода системы: · дискретных 16384 · аналоговых 1024 Габариты 40 х 120 х 130 мм. На нижнем уровне этой системы используются датчики, преобразователи, обеспечивающие сбор информации и ее преобразование в доступный для контроллера вид, а также различные вторичные приборы, служащие для отображения и регистрации информации о состоянии объекта управления в вид доступный для восприятия человеком-оператором. Описание функциональной схемы автоматизации технологического процесса, предусматривающей выбор локальных технических средств. Контроль наличия исходного цинкового концентрата в бункерах осуществляется радарными уровнемерами Rosemount 5401 (поз.1а,2а) c выходными унифицированными сигналами 4-20мА, которые поступают на модуль ввода аналоговых сигналов AI контроллера Simatic S7-300. Автоматическое дозирование сульфидного цинкового концентрата осуществляется ленточным питателем с встроенным тензорезисторным датчиком ДСТБ-016 (поз.3а). Выходной сигнал с тензорезисторного датчика преобразовывается с помощью показывающего и регистрирующего прибора ДИСК 250-ТН (поз.3б) в непрерывный токовый сигнал, который далее поступает на AI контроллера Simatic S7-300. Из датчиков для измерения температуры выбраны термопреобразователи ПК "Тесей" термоэлектрические преобразователи КТХА, медные термопреобразователи сопротивления ТСМТ, так как они в качестве ни чем не уступают приборам концерна "Метран", Siemens, но в цене намного дешевле чем приборы других производителей. Контроль температуры осуществляется следующим образом. Для контроля температуры в форкамере и в печи кипящего слоя в семи точках кипящего слоя (одна в форкамере и шесть в печи) установлены термоэлектрические преобразователи КТХА 01.16 (поз.4а-поз.10а) преобразующие температуру в унифицированный сигнал, который поступает в AI контроллера Simatic S7-300. Регулирование температуры в печи осуществляется изменением расхода сульфидного концентрата, подаваемого в печь, за счет частоты вращения двигателя, которая регулируется пропорционально изменению напряжения в обмотке возбуждения. Для этого управляющий сигнал с дискретного выхода DO контроллера поступает на блок управления БУ-21 (поз.4б) и далее на реверсивный бесконтактный пускатель ПБР-2М1 (поз.4в) с него на двигатель постоянного тока служащего приводом ленточного питателя. Температура под сводом печи, в аэрохолодильнике, перед циклонами СИОТ, НИОГАЗ, после циклона НИОГАЗ контролируется термоэлектрическими преобразователи КТХА 01.18 (поз 11а-21а), питательной воды в первой и второй нитке перед барабаном-сепаратором котла-утилизатора медными термопреобразователями сопротивления ТСМТ 101 (поз.22а,23а) и температура пара после барабана, со свода печи, после циклонов и потребителю контролируется термоэлектрическими преобразователями КТХА 01.07 (поз 24а-28а) аналогичным образом. Из датчиков давления хорошо зарекомендовали себя интеллектуальные датчики давления Метран-100, Метран-49 с применением микропроцессорной электроники в конструкции. Контроль давления осуществляется следующим образом. Упругость воздушно-кислородного дутья на форкамеру печи, на подину и на аэрохолодильник контролируется с помощью преобразователей давления Cerabar M (поз.29а-31а) преобразующих давление в токовый сигнал 4-20мА, который поступает на модуль ввода аналоговых сигналов AI контроллера. Для измерения разрежения под сводом печи, перед циклонами и после циклонов используются интеллектуальные датчики давления Метран-100-ДИВ (поз.32а-35а) измеряющие и непрерывно преобразующие разрежение в аналоговый токовый сигнал, который заводится на аналоговый вход контроллера. Давление питательной воды в первой и второй нитке барабана-сепаратора, давление пара после циклонов СИОТ, после свода печи, давление пара потребителю и в барабане котла измеряется и преобразуется датчиками давления Метран-100-ДИ (поз.36а-42а) сигнал с которых заводится на аналоговый вход контроллера. Для контроля количества выбраны сужающие устройства ДБС, в комплекте с датчиками разности давлений, измеряющие расход методом переменного перепада давлений. Вихревые расходомеры PROWIRL производства "Endress+Hauser" очень устойчивые к вибрациям за счет специальной конструкций сенсора с широким диапазоном измерения. Также электромагнитные расходомеры с высокой точностью измерений. Контроль расхода осуществляется следующим образом. Для измерения расхода воздуха подаваемой на форкамеру, на подину печи и на аэрохолодильник, в воздуховодах установлены диафрагмы типа ДБС 0,6-800 (поз.43а-45а), которые обеспечивают перепад давления, перепад давления преобразовывается в электрический токовый сигнал 0÷5мА преобразователями типа Метран-49-ДД (поз.43б-45б), сигнал с которых заводится на аналоговый вход контроллера. Для регулирования количества воздуха по этим каналам используется сигналы с дискретного выхода контроллера, которые идут на универсальные переключатели типа УП (поз 43в-45в), далее на пускатели ПБР-2М1 (поз.43г-45г), на выход которых подключены исполнительные механизмы типа МЭО (поз.43д-45д) регулирующих клапанов. Количество расхода воды к кессонам аэрохолодильника, к кессонам слоя печи, пара и воды к блокам термосифонов, воды на непрерывную продувку и расхода пара из барабана, на свод печи и потребителю измеряется датчиками расхода - вихревыми расходомерами PROWIRL (поз.46а-54а), и преобразуется в аналоговый сигнал 4÷20мА преобразователями PROWIRL (поз.46б-54б) входящими в комплект с датчиками, сигнал с которых идет на аналоговый вход контроллера. Для регулирования количества воды на непрерывную продувку сигнал с дискретного выхода контроллера идет на блок управления БУ-21 (поз 51в), далее на пускатель ПБР-2М1 (поз.51г), на выход которого подключен исполнительный механизм типа МЭО (поз.51д) регулирующего клапана со встроенным датчиком положения исполнительного механизма (поз.51е), унифицированный сигнал с которого поступает на модуль ввода AI. Измерение количества питательной воды в первой и второй нитке барабана-сепаратора осуществляется датчиком электромагнитного расходомера MAG 3100 (поз.55а,56а), далее сигнал с комплекта электромагнитного расходомера преобразователя сигналов MAG 3100 (поз.55б,56б) заводится на аналоговый вход контроллера. Для регулирования количества воды в первой и второй нитке барабана-сепаратора используются сигналы с дискретного выхода контроллера, которые идут на универсальные переключатели типа УП (поз 55в,56в), далее на пускатели ПБР-2М1 (поз.55г,56г), на выход которых подключены исполнительные механизмы типа МЭО (поз.55д,56д) регулирующих клапанов. Для измерения количества кислорода в дутье установлена диафрагма типа ДБС 0,6-600 (поз.57а), которое обеспечивает перепад давления, перепад давления преобразовывается в электрический токовый сигнал 0÷5мА преобразователем типа Метран-49-ДД (поз.57б), сигнал с которого заводится на аналоговый вход контроллера. Для регулирования количества кислорода в дутье используется сигнал с дискретного выхода контроллера, который идет на универсальный переключатель типа УП (поз 57в), далее на пускатель ПБР-2М1 (поз.57г), на выход которого подключен исполнительный механизм типа МЭО (поз.57д) регулирующего клапана. Для измерения содержания кислорода в дутье и преобразования его в аналоговый сигнал используется анализатор кислорода DRAGER POLYTRON 7000 Module (поз.58а,58б), сигнал далее заводится на модуль ввода AI. Для регулирования разряжения на всасе и на выхлопе дымососа3 и дымососа4 сигналы с дискретного выхода контроллера идут на блоки управления БУ-21 (поз 59а-62а), далее на реверсивные пускатели ПБР-2М1 (поз.59б-62б), на выход которых подключены исполнительные механизмы типа МЭО (поз.59в-62в) регулирующих клапанов со встроенными датчиками положения исполнительных механизмов (поз.59г-62г), унифицированный сигнал с которых поступает на модуль ввода AI. Для управления скоростями дымососа3 и дымососа4 сигналы с дискретного выхода DI контроллера поступают на блок управления БУ-21 (поз.63а,64а) и далее на реверсивный бесконтактный пускатель ПБР-2М1 (поз.63б,64б) с него на двигатель. Контроль за работой двигателей ведется по состоянию ключей магнитного пускателя (поз.65а), для чего с последних заведена электрическая проводка к дискретному модулю контроллера. Сигналы о положении переключателей (поз.4в,51в,59а-64а) в различных режимах поступают на модуль ввода DI контроллера. 3. Экономическая часть 3.1 Обоснование экономической эффективности от внедрения АСУТП обжига в печи КС 3.1.1 Определение прироста прибыли Экономический эффект от применения автоматизированной системы управления обуславливается прежде всего повышением эффективности автоматизируемого производства, определяемым повышением качества и надежности управления, снижением потерь, повышением производительности и т.п. Внедрение автоматизированной системы управления процессом обжига в печи КС позволяет вести процесс в оптимальном температурном режиме, обеспечивающем высокое качество получаемого продукта - огарка. В результате оптимального ведения процесса обжига уменьшается погрешность температурного режима с 10% до 2%, в следствии чего производительность увеличивается на 3%. При производительности 86450т/год, дополнительный выход огарка составит 1464,3т/год. При стоимости одной тонны огарка 16000 тенге, дополнительная прибыль в год составит: Пдоп=1464,3*16000=23428800тг 3.2 Определение текущих затрат на разработку, внедрение, эксплуатацию и обновление АСУТП и расчет фонда заработной платы обслуживающего персонала 3.2.1 Расчет затрат на разработку и внедрение системы автоматического управления Затраты на приобретение комплектующих АСУТП (затраты на приборы и средства автоматизации, вычислительный комплекс) Касутп= 4973,6 тыс. тг. Капитальные затраты на неучтенное оборудование рассчитываем, исходя из 5% от общей стоимости: Кпр. об=Касутп·0,05 Кпр. об=4973600·0,05=248680тг Всего стоимость капитальных затрат: Коб=Кпр. об+Касутп Коб=248680+4973600=5222280тг Затраты на научные исследовательские работы и на разработку составляют 20% от стоимости капитальных затрат: Кразр= Коб·0,2 Кразр= 5222280·0,2=1044456тг Затраты на монтаж оборудования составляют 25% от стоимости капитальных затрат: Кмонт= Коб·0,25 Кмонт= 5222280·0,25=1305507тг Итого капитальные затраты на создание системы управления составляют: Ксу= Коб+Кразр+Кмонт Ксу=5222280+1044456+1305507= 7572306тг 3.2.2 Определение затрат на эксплуатацию системы управленияАмортизационные отчисления составляют 15% от величины капитальных затрат: А= Коб·0,15 А= 5222280·0,15=783342тг Затраты на текущий ремонт средств автоматизации и вычислительной техники составляют 2,5% от величины капитальных затрат на создание системы управления. Зт. р=Ксу·0,025 Зт. р=7572306·0,025=189307,65тг Величина затрат на содержание оборудования системы управления составляет 2,3% от капитальных затрат на создание системы управления. Зс. о=Ксу·0,023 Зс. о=7572306·0,023=174163тг Затраты на электроэнергию составляют: Рэл=∑W·t·k где ∑W-суммарная мощность, потребляемая средствами автоматизации и вычислительной техники. Определяется по паспортным данным и равна 30кВт. ч. t-количество часов работы в сутки, 24 часа; k-коэффициент использования мощности - 0,9. Рэл=30·24·0,9=684кВт. ч/сут Рэл. г=365· Рэл Рэл. г=365· 684=236520кВт. ч Для установки 1кВт. ч стоит 5,8 тенге, тогда затраты на электроэнергию за год составят: Зэл. эн= Рэл. г· 5,8 Зэл. эн= 236520· 5,8=1371816тг 3.2.3 Затраты на заработную платуРасчет планового баланса времени на одного рабочего приведен в таблице 5. Таблица 5. Годовой баланс рабочего времени
Расчет годового фонда основной заработной платы для обслуживающего персонала Таблица 6. Профессия, количество человек и оклад работников, обслуживающих систему управления
Годовой фонд основной заработной платы на обслуживающий персонал составит: Страницы: 1, 2, 3, 4, 5, 6, 7, 8 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, рефераты на тему, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||